子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
今月は、センサーで計測した数値を使って、ロボットを動作させるプログラミングについて学んでいる、スタンダード2クラスです。
1週目「サウンドメーカー」 では、超音波センサーで計測した距離を音(の高さ)に変換して、楽器を制作し、
2週目「セーフティーカー」では、超音波センサーで計測した距離をスピードに変換して、距離が近づくとスピードを制御、
そして、3週目の今週は、ジャイロセンサーで計測した傾き(角度)に合わせて、クルマを操縦するようなプログラミングを学びました。
超音波センサーで計測した距離を音(の高さ)に変換して、楽器を制作
2週目「セーフティーカー」
超音波センサーで計測した距離をスピードに変換して、距離が近づくとスピードを制御
そして、3週目の今週は、ジャイロセンサーで計測した傾き(角度)に合わせて、クルマを操縦するようなプログラミングを学びました。
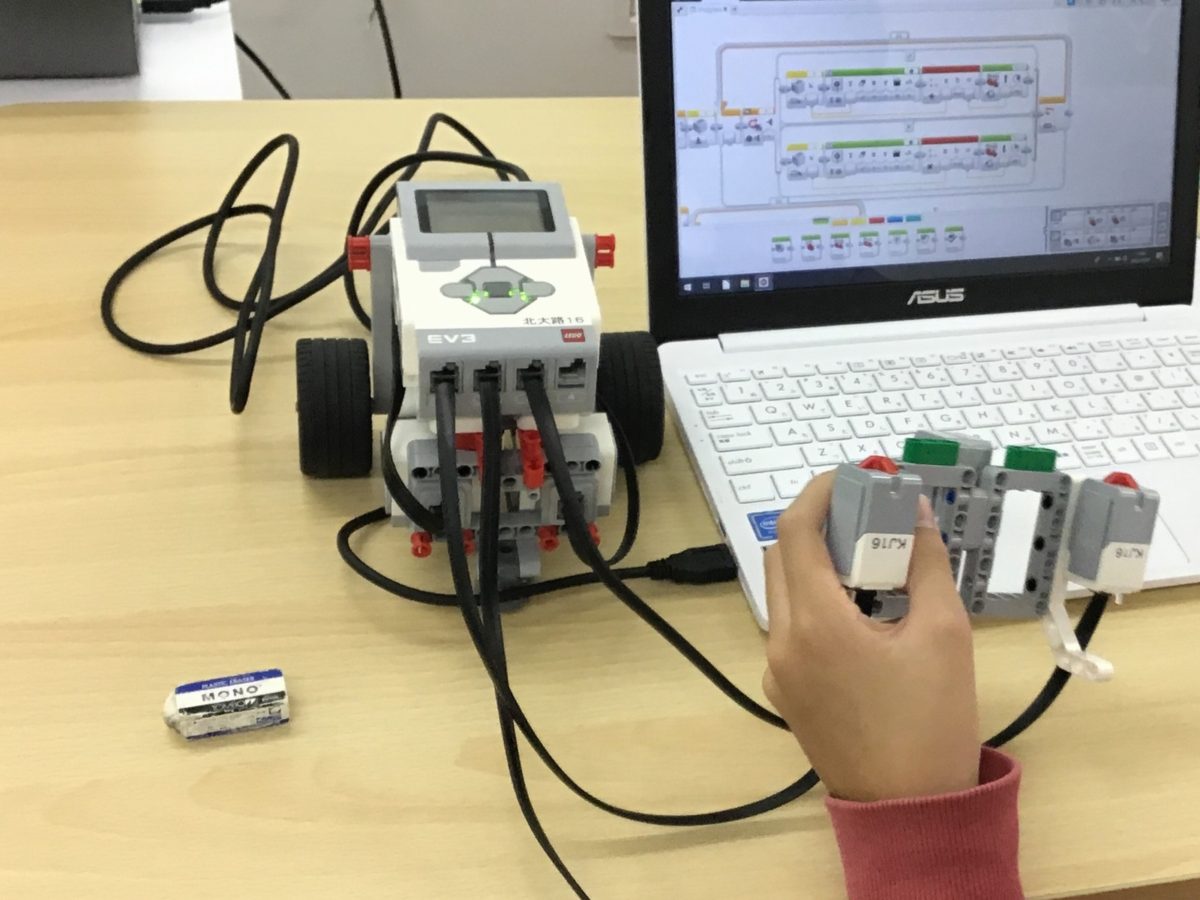
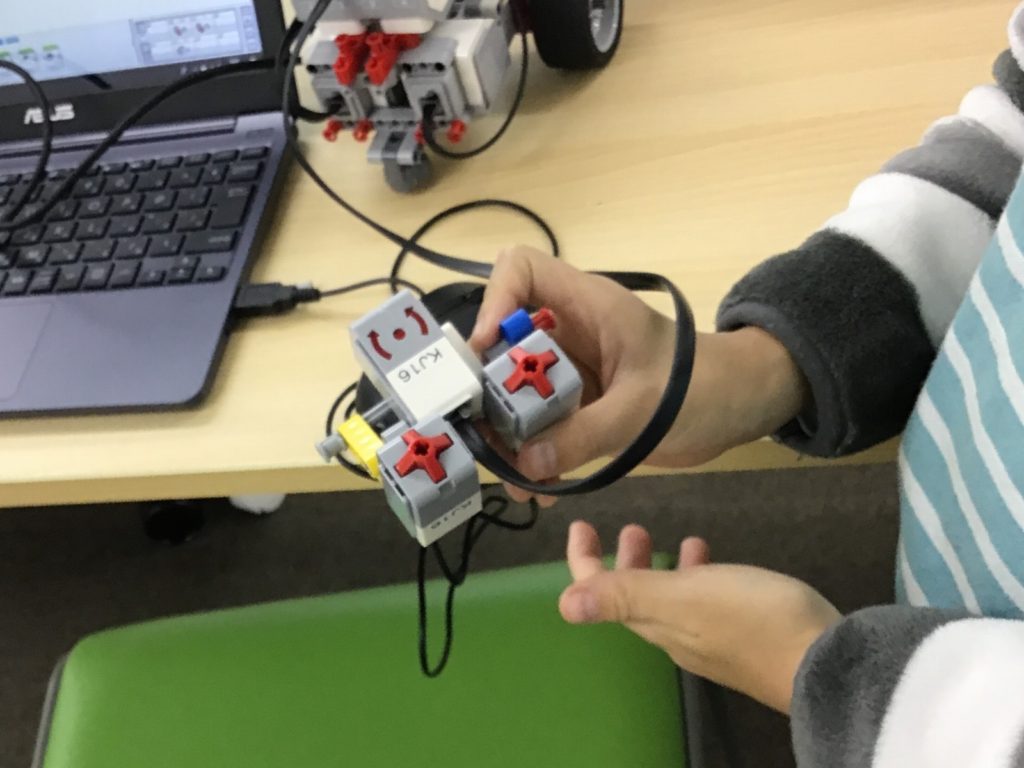
まずは、クルマ型ロボットを操縦するための「コントローラー」を各々作ります。この時、持ちやすく、操作しやすく、ボタンが押しやすいように工夫されたゲーム機のコントローラーを意識しました。
みんな、ゲームが大好きなので、比較的スムーズに開発することができました。
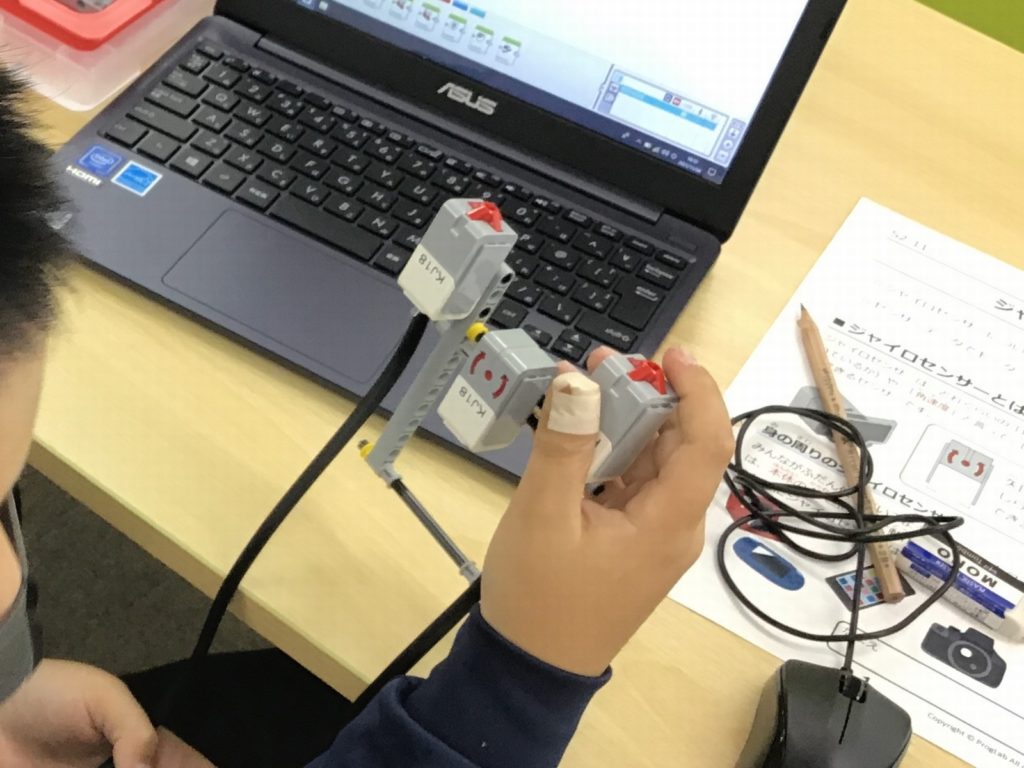
(下の写真の矢印の装置がジャイロセンサーです。)

と同時に、プログラミングも進めます。
ジャイロセンサーのプログラミングを、1つずつ確認しながら進めていきます。
あとは、実際に試験走行をしながら、微調整。自分の感覚より少し曲がりが強そうなら、曲がりを抑えるために小さめの係数を掛けたり、操縦しやすいスピードを探したり、ブレーキボタンやダッシュボタンをプログラミングしたり・・・まるで本物のゲーム制作者の気分です。
全部できたら、サーキットコースを作って、さぁレースです!
障害物を置き、坂道を作ってと、コース設定自体も、子どもたち自身にしてもらって、走行を楽しみました。

ゲームの世界に入り込んで、カートレースのキャラクターたちとレースをしている―――頭の中ではそんなイメージだったんじゃないかと、思いました。