子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
ビギナークラス、11月・12月のテーマは「タッチセンサー」、センサーを使ったロボットとプログラミングに初めて挑戦しました。
プログラムのキホンは【センサーの反応を待って、モーターを動かす】ですが、タッチセンサーの反応には「押された」「離れた」といったパターンがあり、モーターの動きにも「1回転」「動かし始める」「止める」といったいろいろなパターンがあり・・・
例えば、
・タッチセンサーを押したら、モーター1回転
・回っているモーターをタッチセンサーを押して止める
・タッチセンサーを押したら動き始めて、離して止める
などと、動きとプログラミングの組み合わせがいろいろあって、ちょっと複雑です。
とは言え、年長~小学校低学年までの子たちのクラスですから、ここでは完ぺきに理解することに主眼を置かずに、「タッチセンサーをプログラムすると、こんなことができるよ」という紹介と、楽しく遊ぶことを優先します!
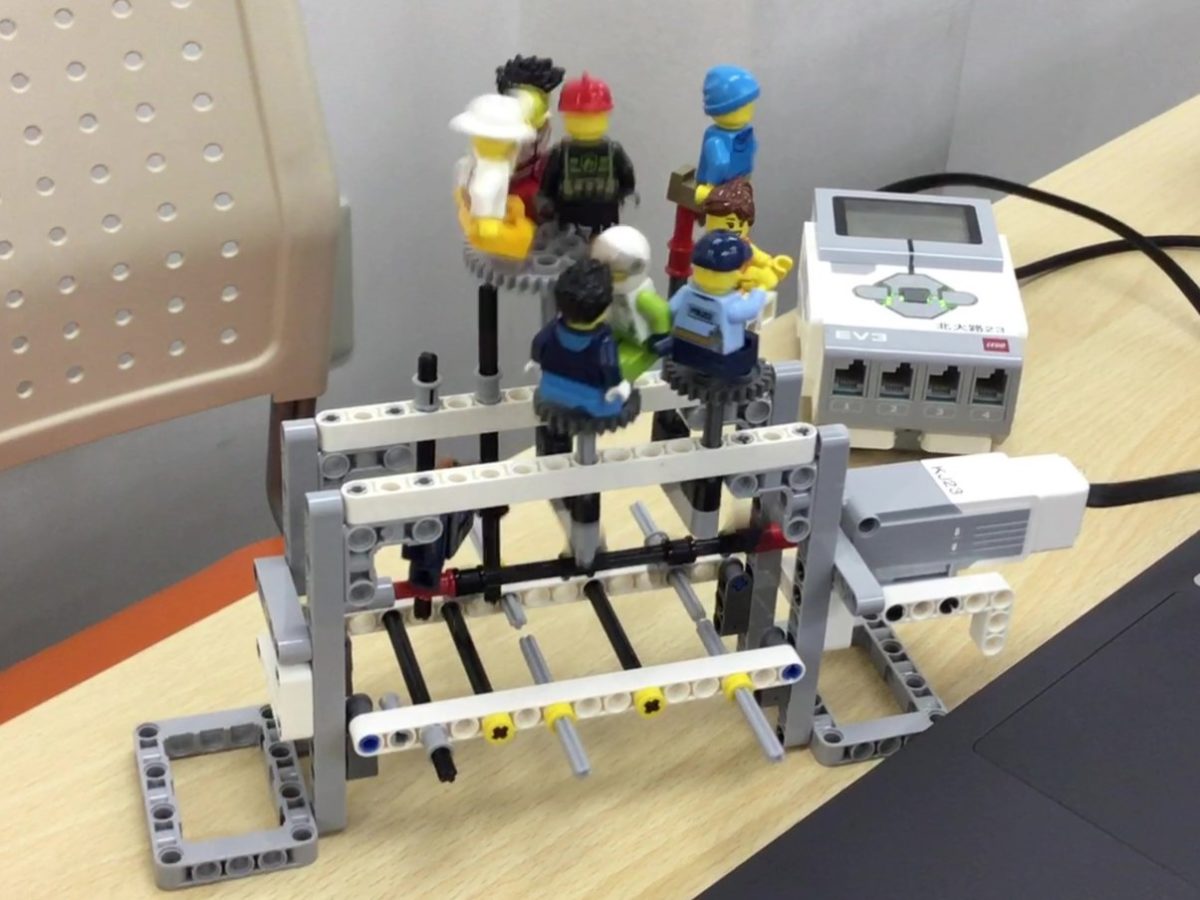
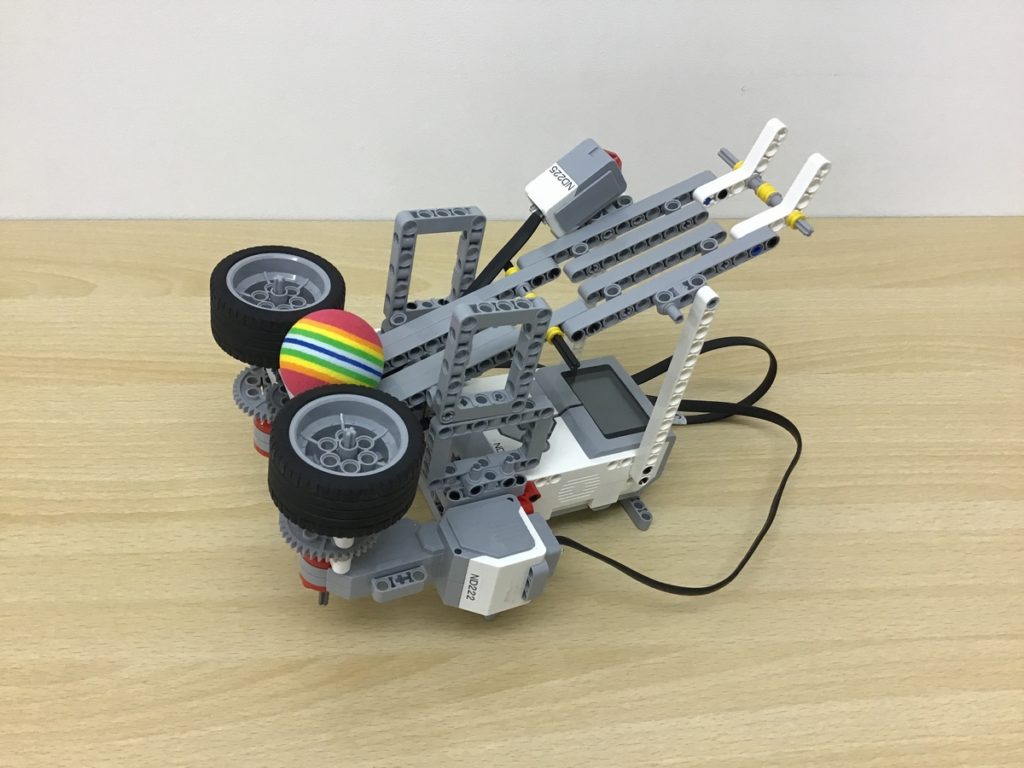
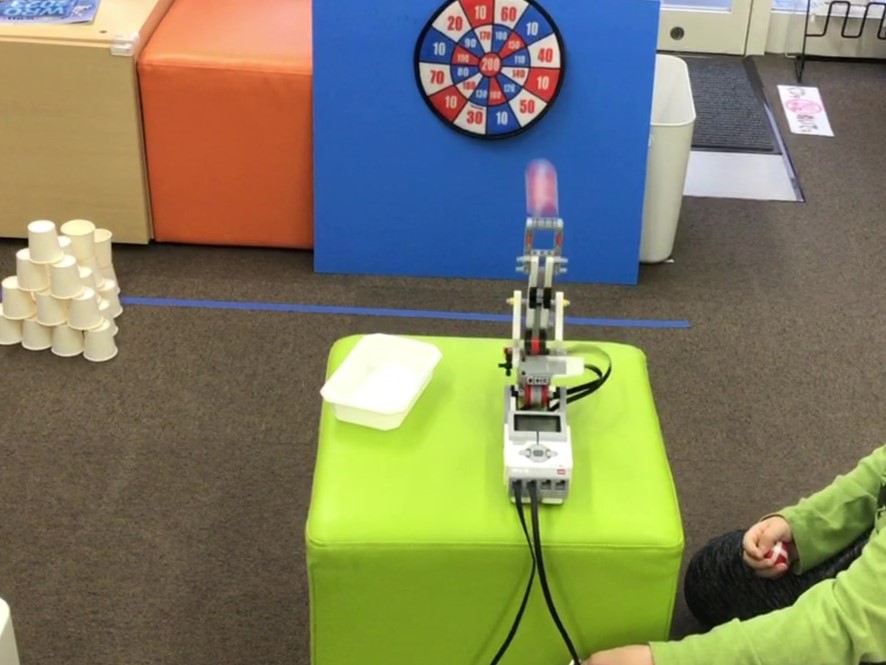
ということで、ロボットアームのようなものでボールを投げる「スローイングマシーン」を作り・・・
その翌週には、アーム部分に輪ゴムを使った「カタパルト」に作り変えて、より遠くへボールが投げられるようにしました。
クリスマスパーティーを意識し、カタパルトでボールを投げるいろいろなゲームを用意したところ、みんな、とても楽しそうに盛り上がっていました♪