子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
アドバンスト2以上のクラスでは、12月に行われる【生徒作品展】に向けて、自由制作に現在取り組んでいます。
自由制作では、これまで学んできた知識や技術を活かして、自分たちの作りたいロボットを考え、チームで制作します。
ただ、いきなり自由と言われても困りますので、これまで作ってきたロボットやプログラミングを思い出し、過去の自由制作や他のチームの(時には海外のビルダーさんの)作品をYouTubeなどで調べて、進めていきます。
※ちなみに、過去の自由制作作品がプログラボのYouTubeチャンネルで紹介されています。
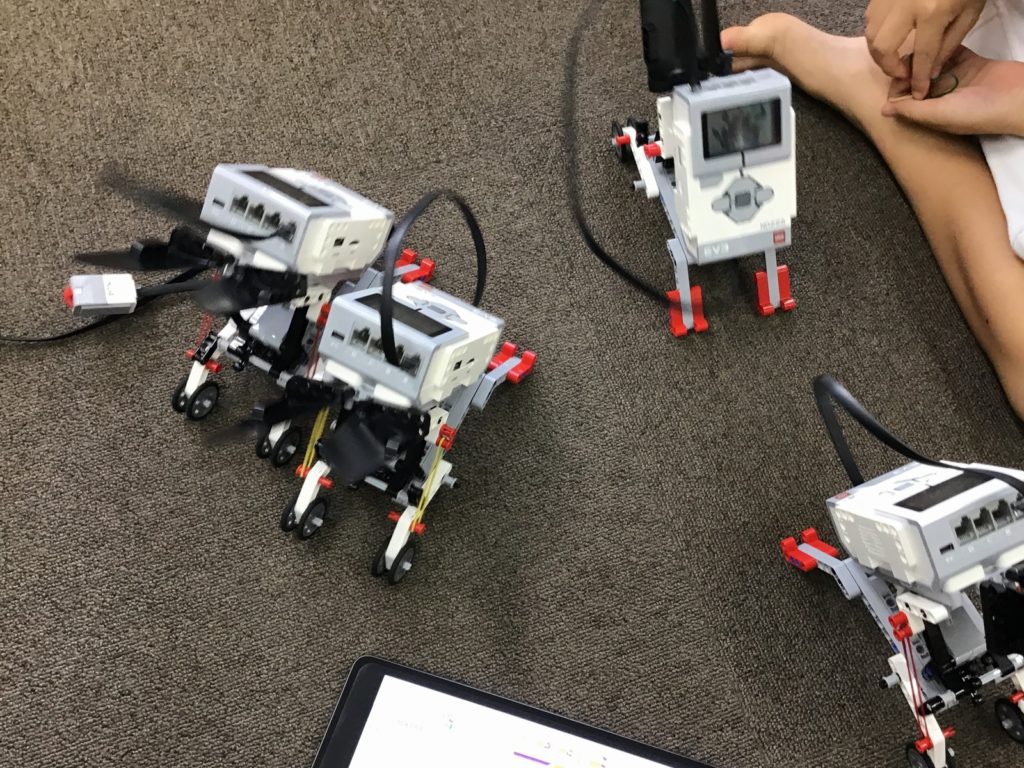
北大路教室のアドバンスト2コースは、曜日ごとに2チームに分かれて、1つは「歩行ロボット」、もう1つは「射的ゲーム」を選びました。
まだ途中ではありますが、現在の状態を簡単にご紹介します。
<歩行ロボット>

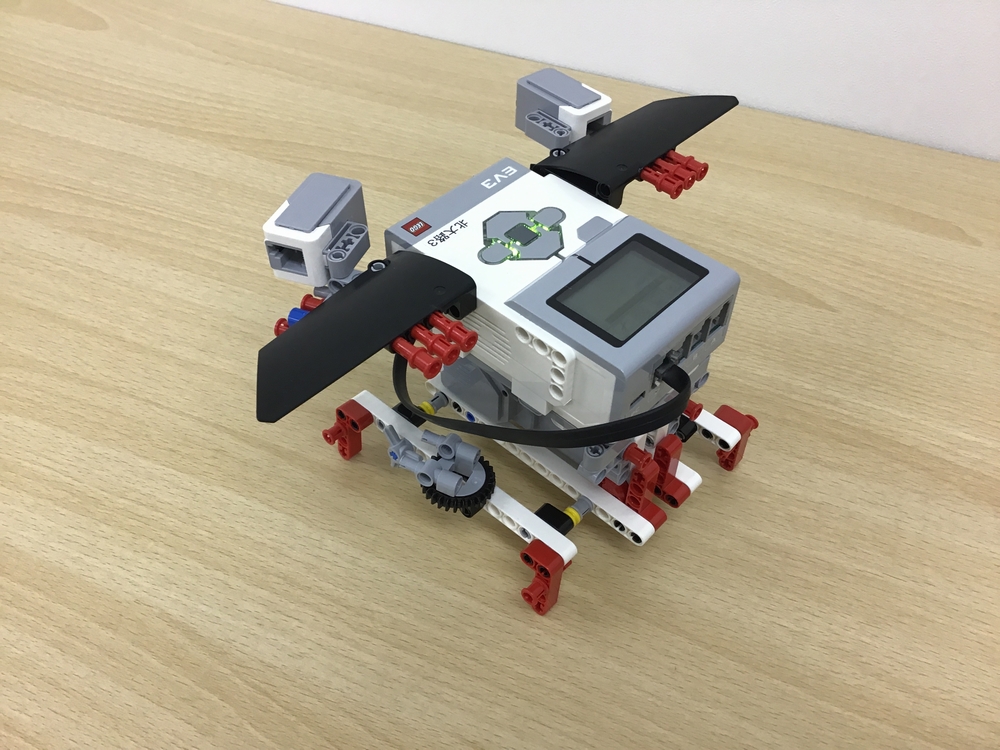
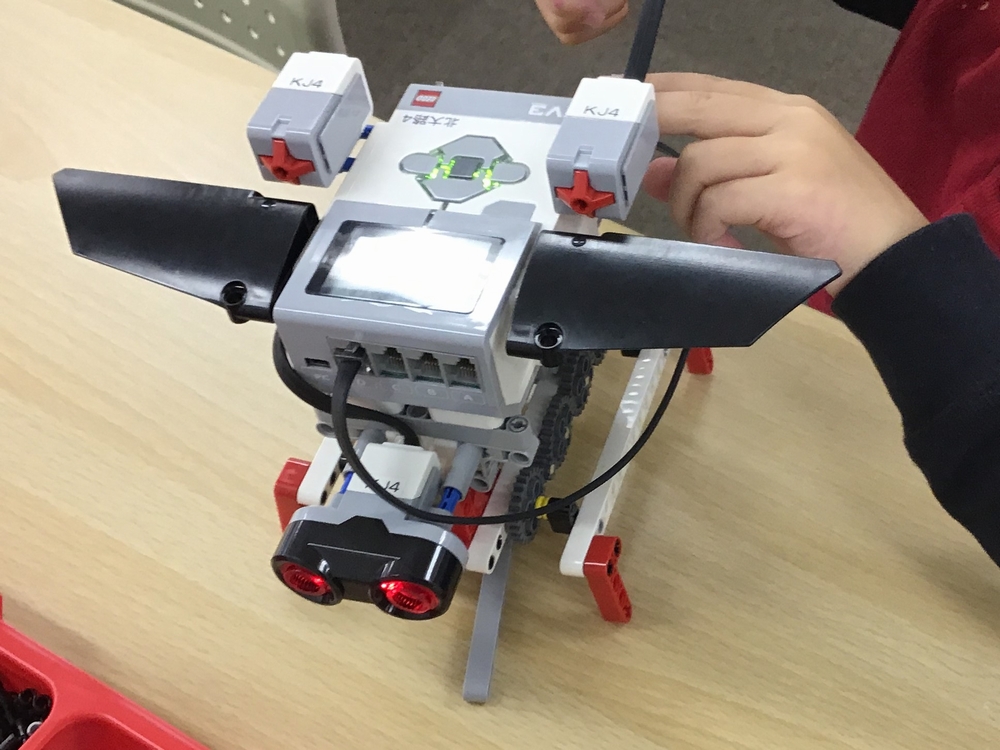
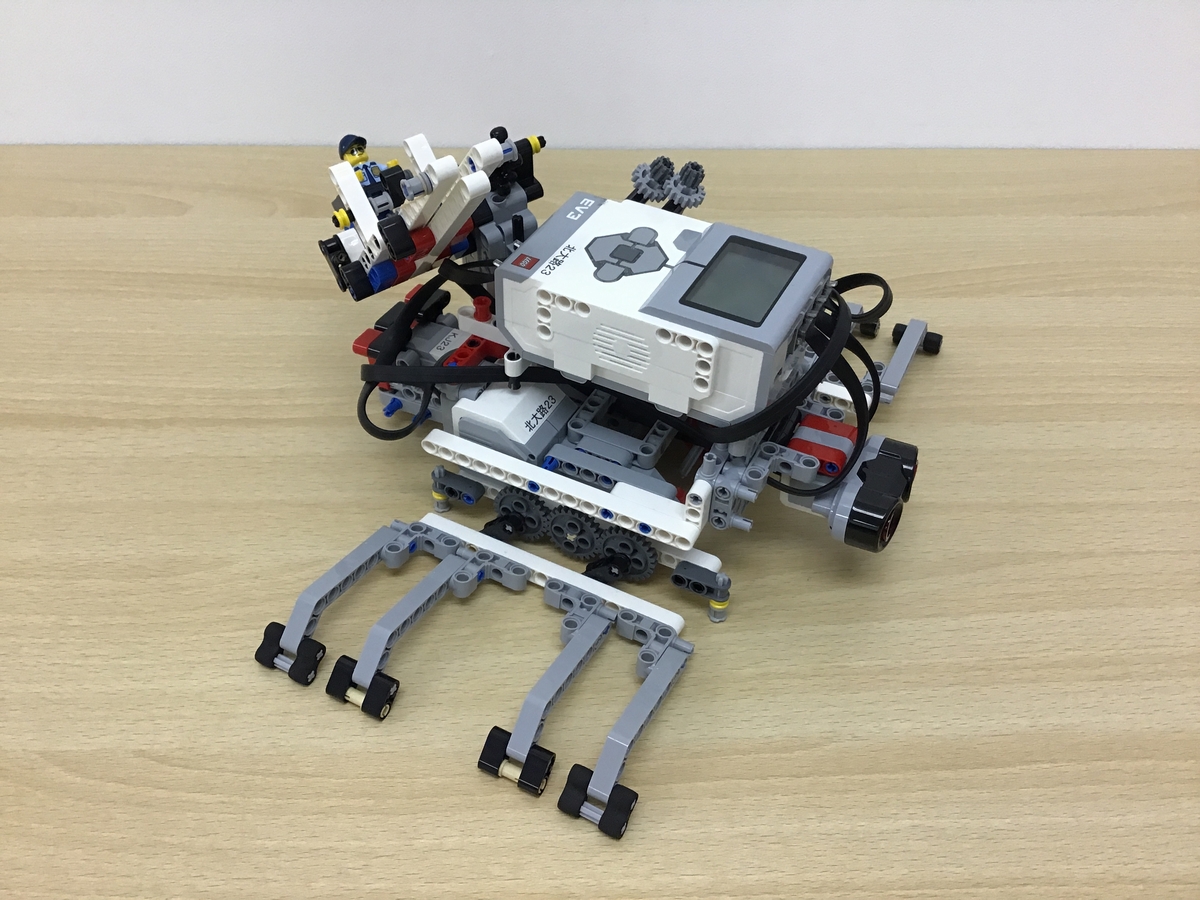
クモのような形の歩行ロボットです。この作品はプログラムを含めてほぼ完成しています。
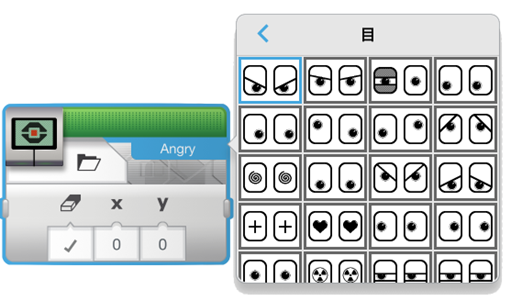
カラーセンサーが付いていて、読み込ませる(ブロックの)色で、歩いたり、ミサイルを発射したりといったロボットの動きをコントロールできるようになっています。
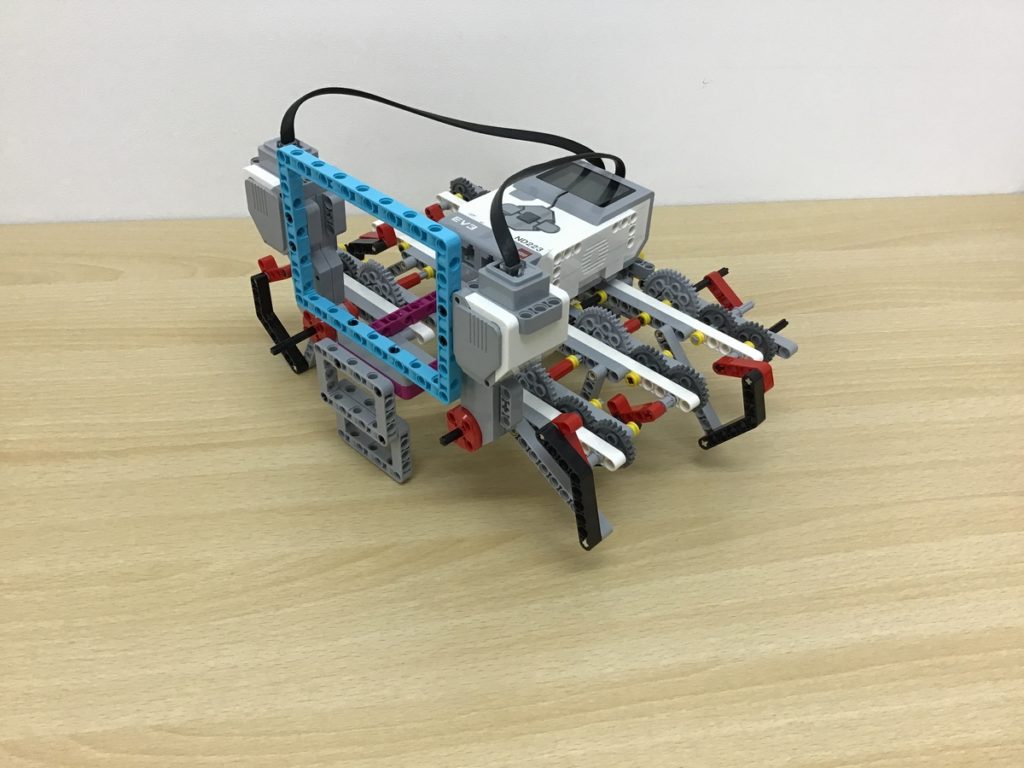
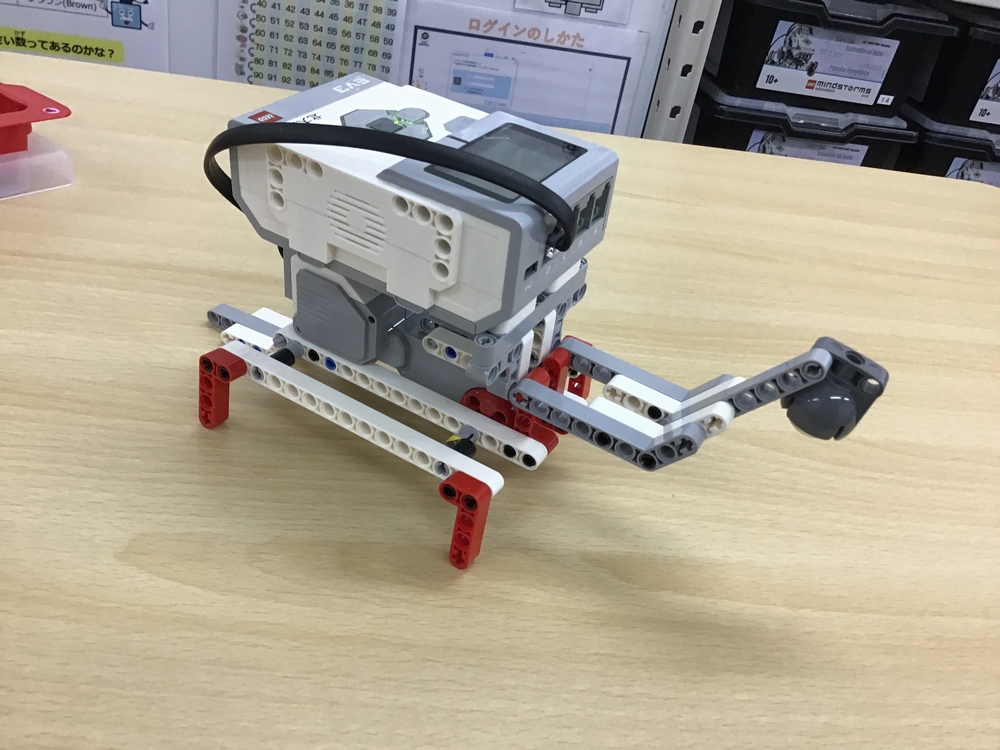
こちらは「四節リンク機構」を使った歩行ロボットです。動かしてみると、少しカクカクしていますが、それでも歩いている雰囲気は出せました。あとはモーターの動きなどを調整して・・・今後どうなるか期待です。
<射的ゲーム>
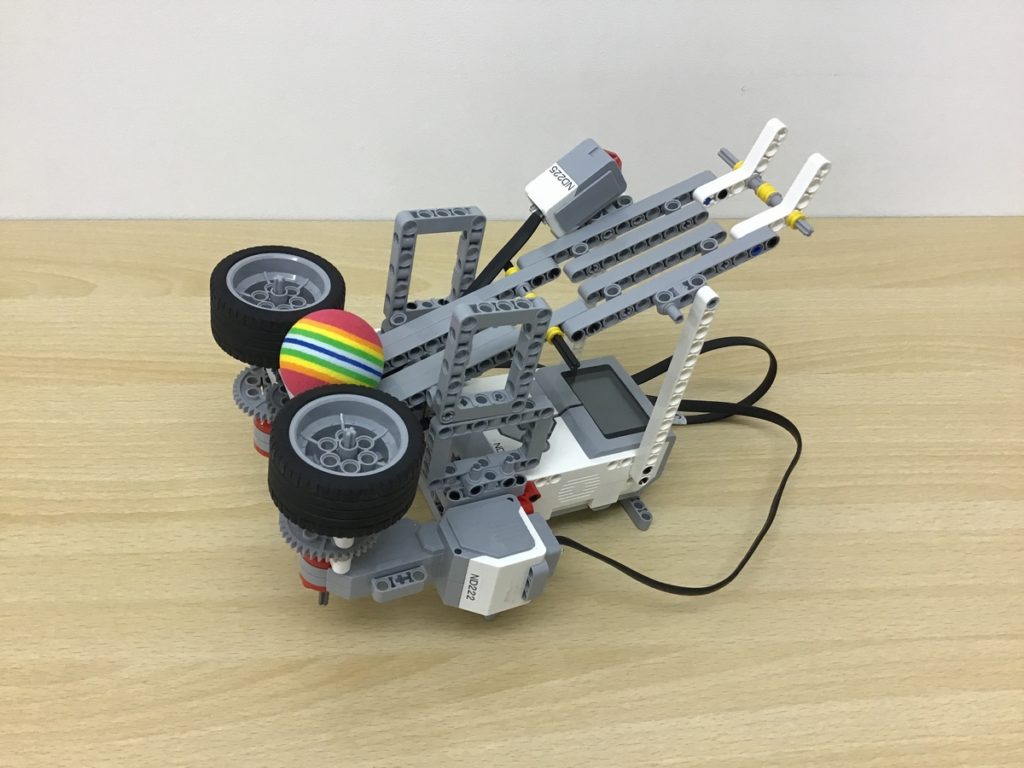
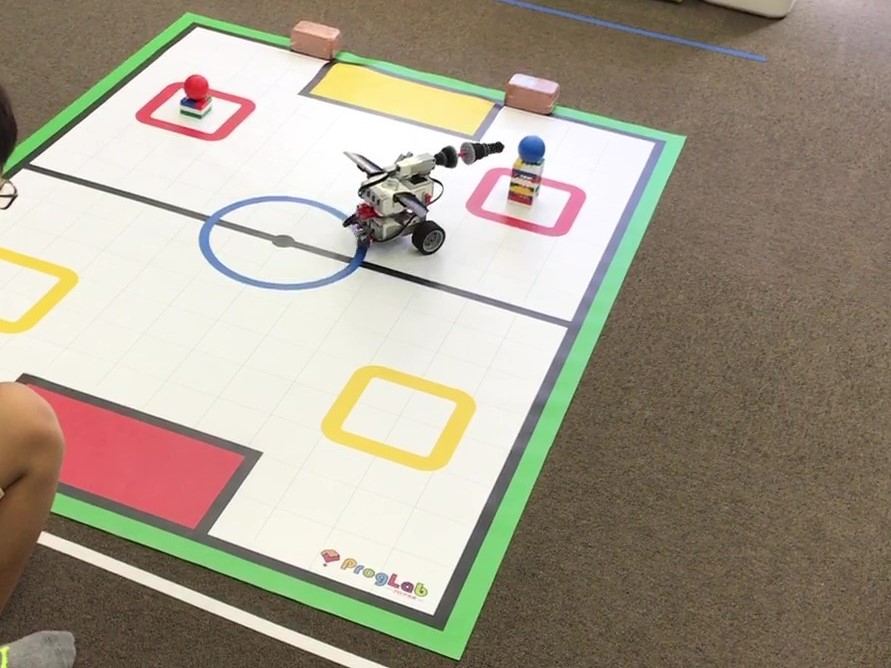
射的ゲームのボールを飛ばす部分です。基本的な仕組みやプログラムはでき、そこまで強くないもののボールを前に飛ばせるようになりました。(安全面を考えるとこのくらいの威力でいいのかも。)
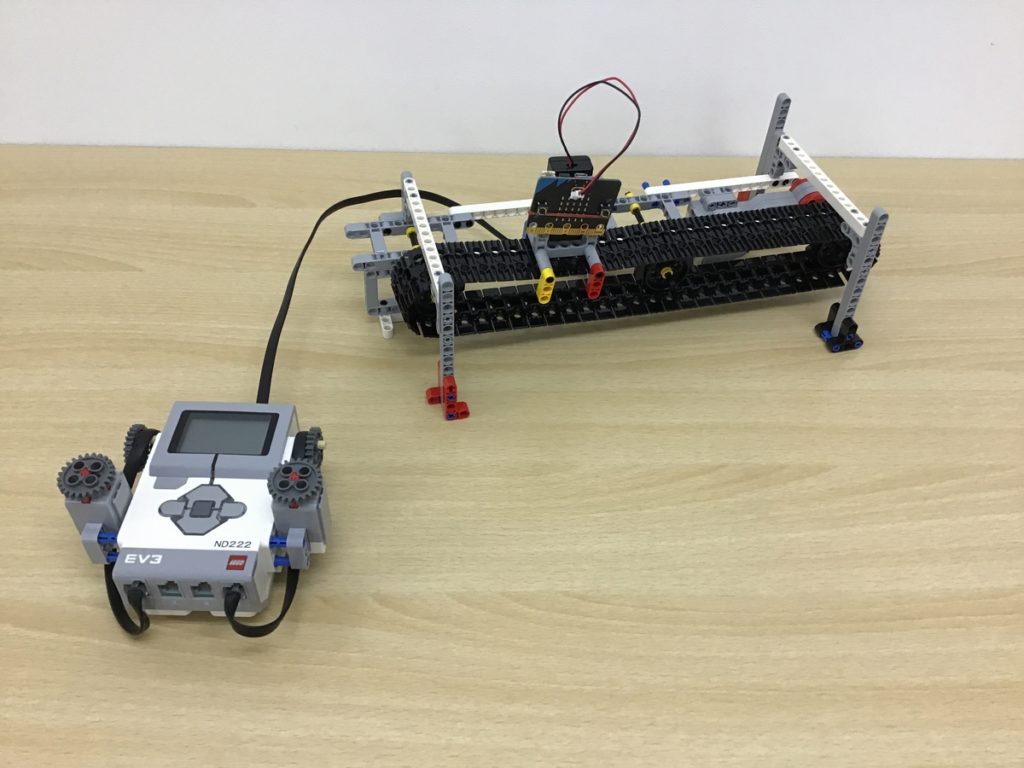
こちらは射的の的(まと)の部分です。
コントローラーで動かすことができるので、攻撃と防御、対戦ゲーム方式になるようです。
的にはmicro:bitというマイコンボードが付いていて、ボールが当たると反応して教えてくれます。(どのように教えてくれるかはこれから検討です。)
なお、ゲーム系はルールなども考えないといけませんが、それもこれからです。
実はもう1チーム、中学生3人のチームがあるのですが、ちょっと難しいことを考えているようで・・・正直に言うと難航しているように見えます。
この辺りの“プロジェクト・マネジメント”も重要になってくるのが、自由制作です!
さて、京都地区(京都市内)では12月中旬~下旬にかけて【生徒作品展】が洛西口・四条烏丸・北大路の3つの教室を巡回します。
入場自由ですので、みなさん是非お越しください。