子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
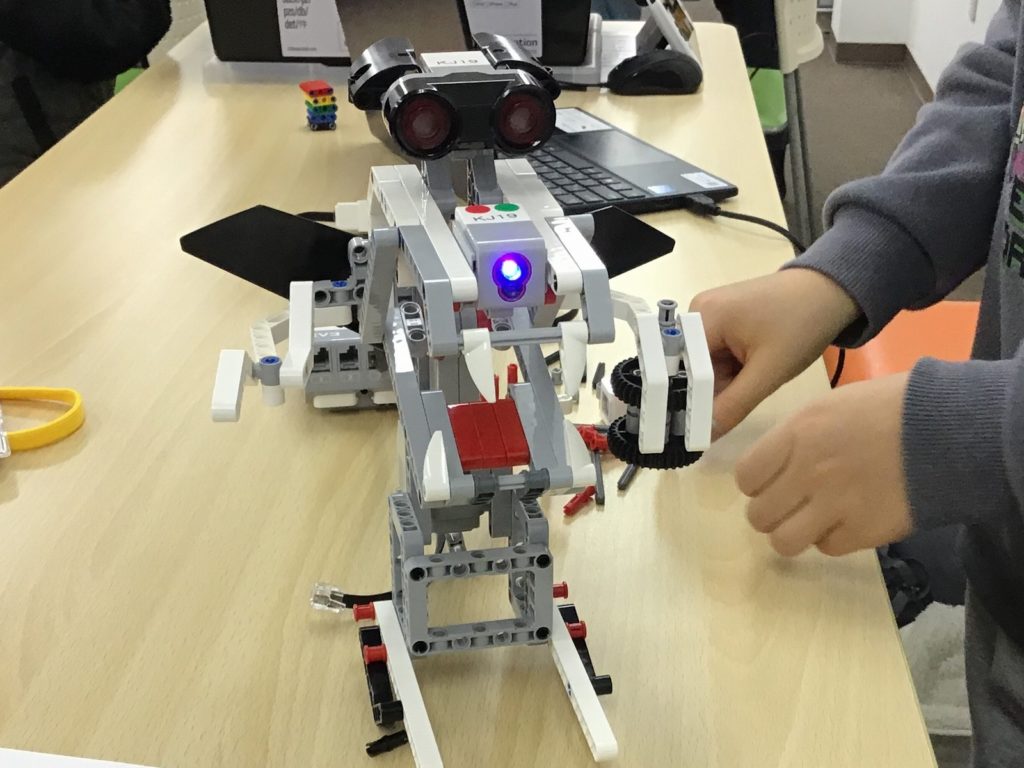
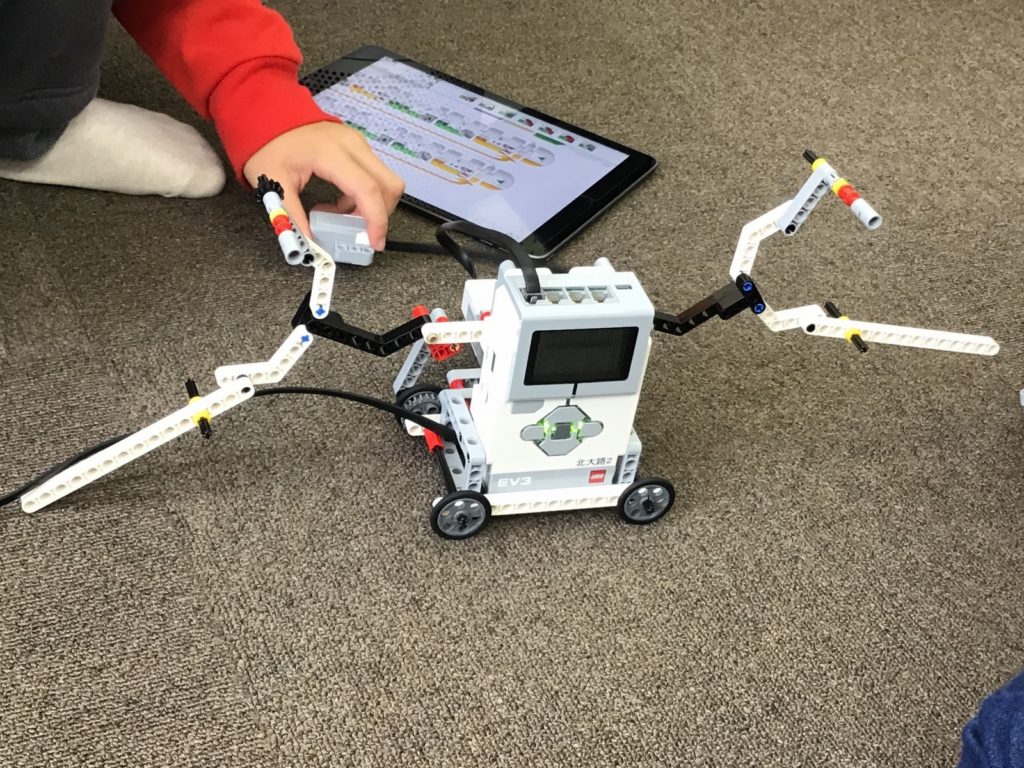
12月、アドバンスト1クラスでは歩行ロボットについて研究しています。
これまで作ったほとんどのロボットは、タイヤを回して移動してきました。
特にロボット競技などでは、きっちりの長さを進んだり、曲がったりする必要があるので、タイヤ移動が欠かせません。
しかし、みんながイメージする【ロボット】は、決してタイヤで移動するものばかりではなく、「ヒト型の二足歩行ロボットをいつか作りたい!」と思ったりするでしょう。
ということで、いろいろな歩行(ここでは広い意味で車輪以外で移動する)ロボットを試したり、工夫したりと研究してみました。
※この後紹介する「○○型」という名前は、動きを見て私がイメージして勝手に名付けたものです。人によって別のものに見えるかも・・・
<1>バタフライ型
小さい手を付けて、それを回すことで、水泳のバタフライのような動きで前進します。比較的単純な仕組みと動きで、移動できました。
<2>ムシ型
平行リンクという仕組みを使って前進します。ゆっくり動いて、頑張って進んでいる感じが出ています。よいしょ、よいしょ。
<3>汽車型
さっきの「ムシ型」と同じ動きですが、より速く動かしているので、汽車の側面の動きをイメージさせます。
<4>カメ型
<2><3>と同じ平行リンクと言う仕組みを使っていますが、右と左の足を逆位相にして交互におろすので、亀のように見えます。
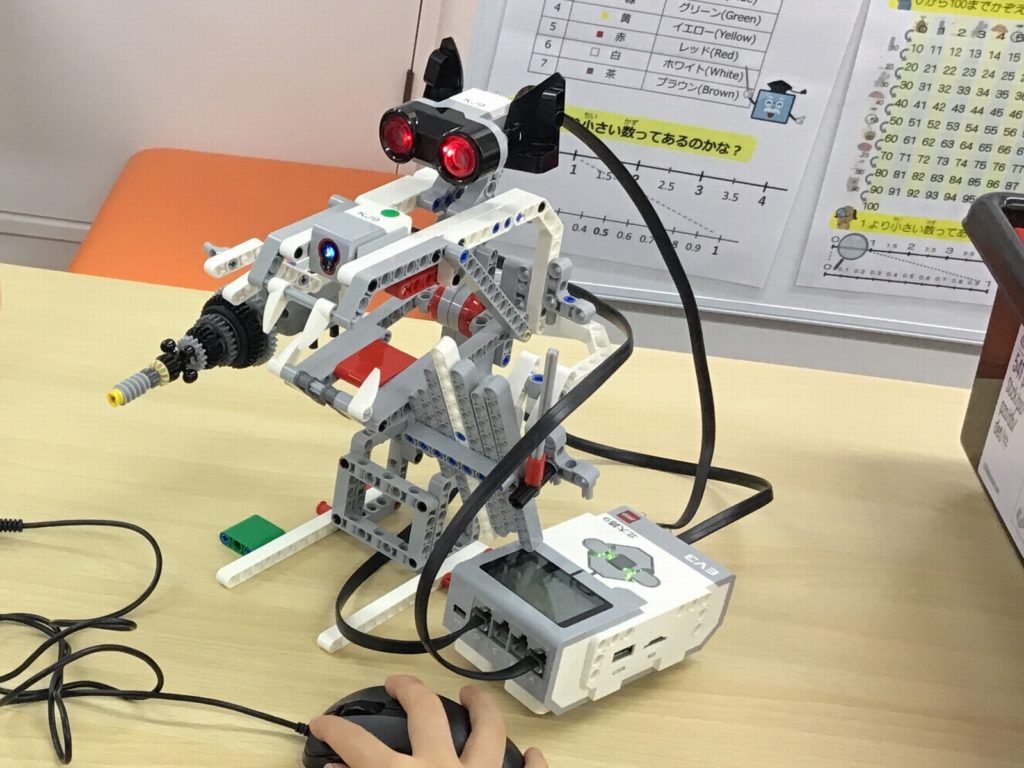
<5>ヒト型
<4>と同じ仕組みですが、何とか人のように二足歩行させようとした意欲作。バランスを崩して倒れたりと、ここに至るまでにとても苦労していました。
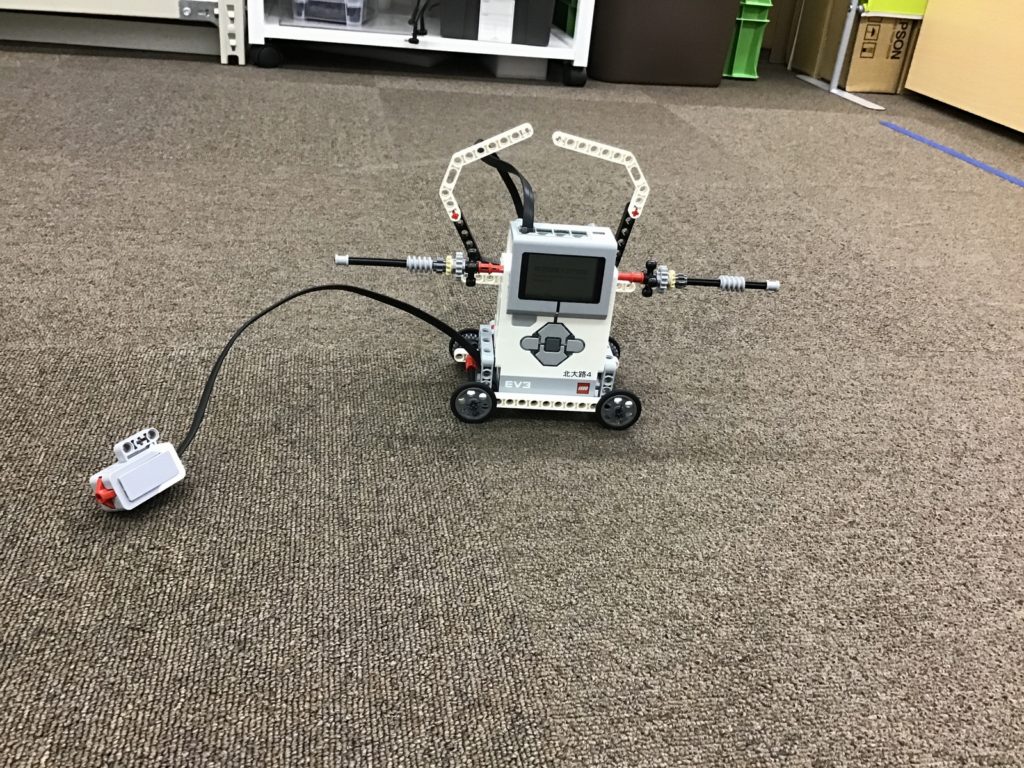
<6>スキー型
クロスカントリースキーのストックのような足?(手?)を付けて、滑りながら前進します。重い本体を下にするので、とても安定しています。
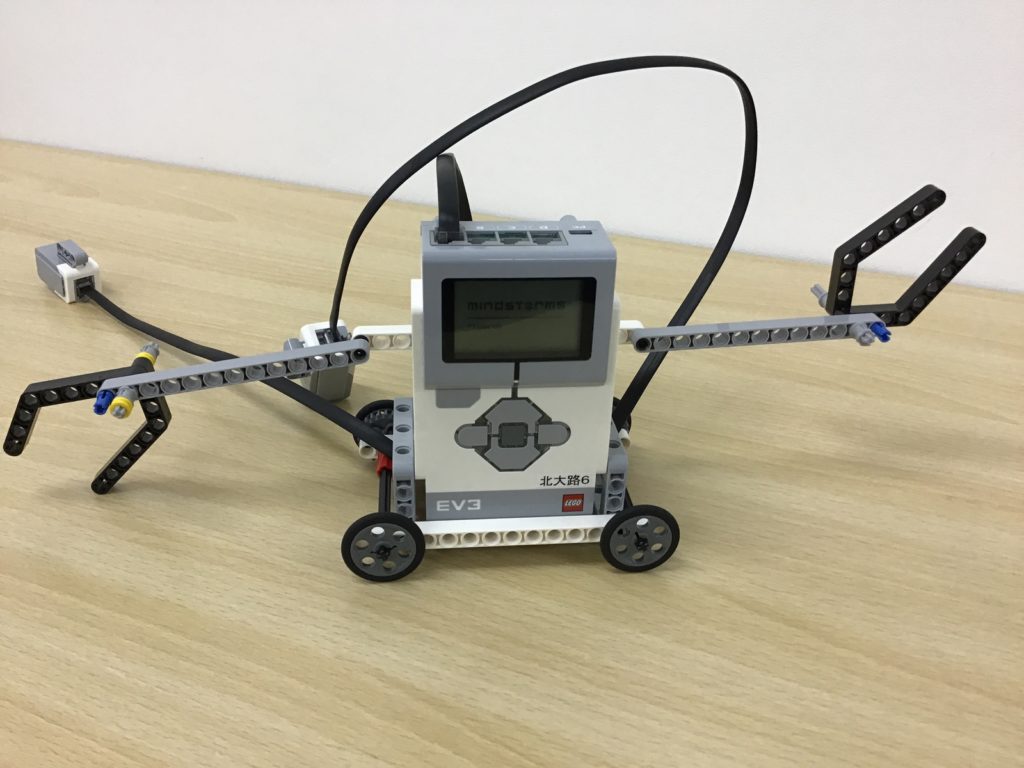
<7>回転型
長い手を使って、本体自体を回転させながら高速で前進します。
でも、機械が壊れそうでヒヤヒヤします・・・
<8>小鹿型
どちらも四節リンクという仕組みを使って4本の足をバラバラに動かします。ただ、2つは別々のタイプで、足運びが少し違います。
あまり安定しないので、ゆっくり動かしたところ、よちよち歩きする生まれたての小鹿のように見えました。
<9>ゾウ型
これも四節リンクを使っています。
後ろ足に滑り止めを付け、前方には重りを付け、前に進むための微妙なバランス調整をしています。
安定して歩行させようとすると、全体のバランスだったり、モーターの回転速度だったり、足先の形状だったりを調整しないといけないことが、授業を通してよく分かりました。
→プログラボの詳細と無料体験会のお申し込みはこちらから