子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
アドバンスト1クラスでは新年度を迎え、夏のロボット競技大会に向けて、まずは基本的な動きを確認するようなミニミッションに取り組みました。
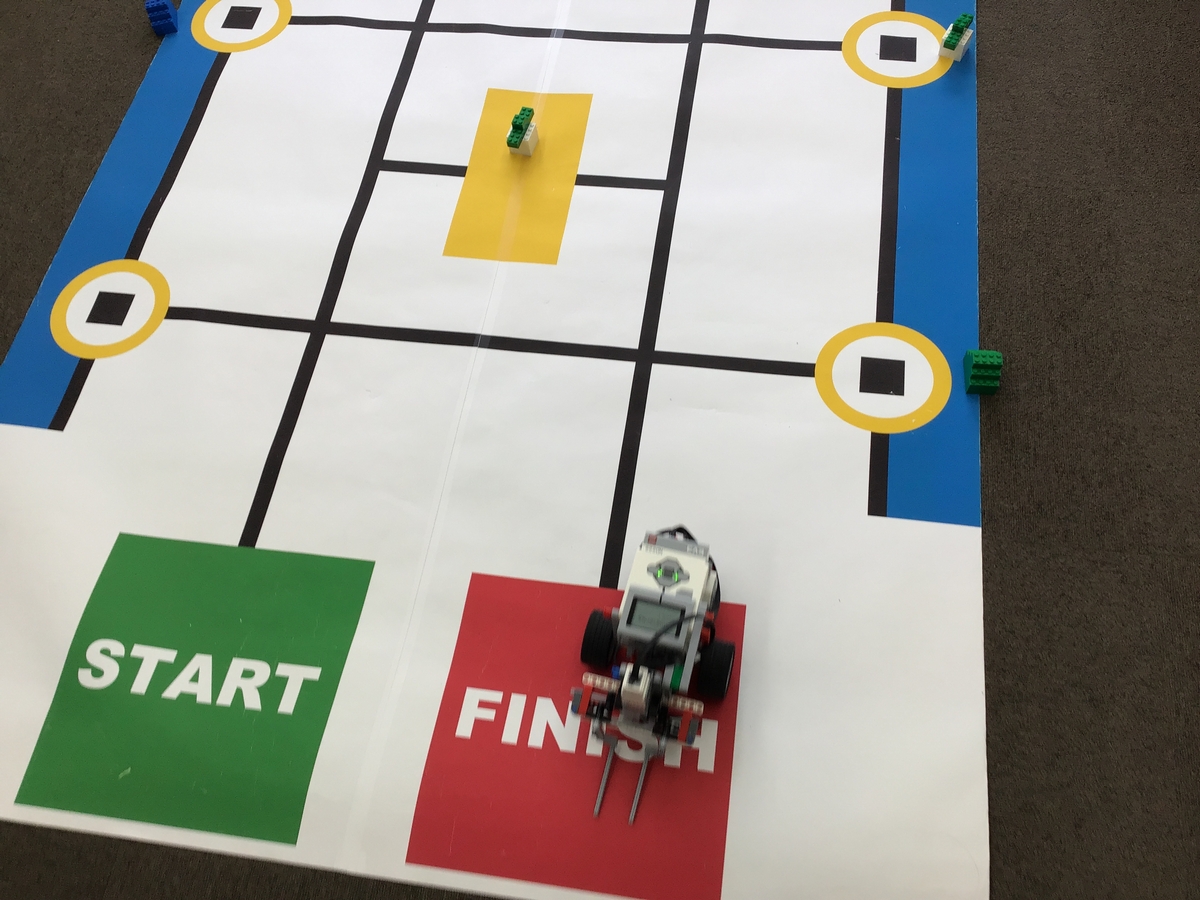
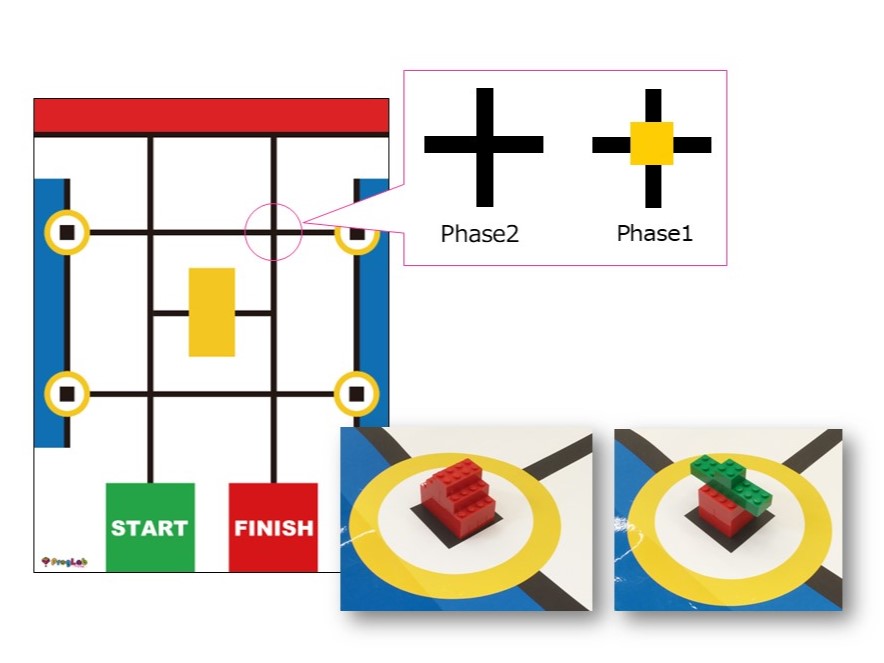
クラスが進むにつれて、ロボットをより正確に動かす必要があります。
スタート位置をしっかり調整したり、ロボットがより確実に同じところを通るような動きを考えたり・・・動き自体は昨年度までやっていたのと同じなのですが、意識するポイントが、より細かくなりました。
そして、何度も何度も失敗(ではなくて調整!)を繰り返し・・・
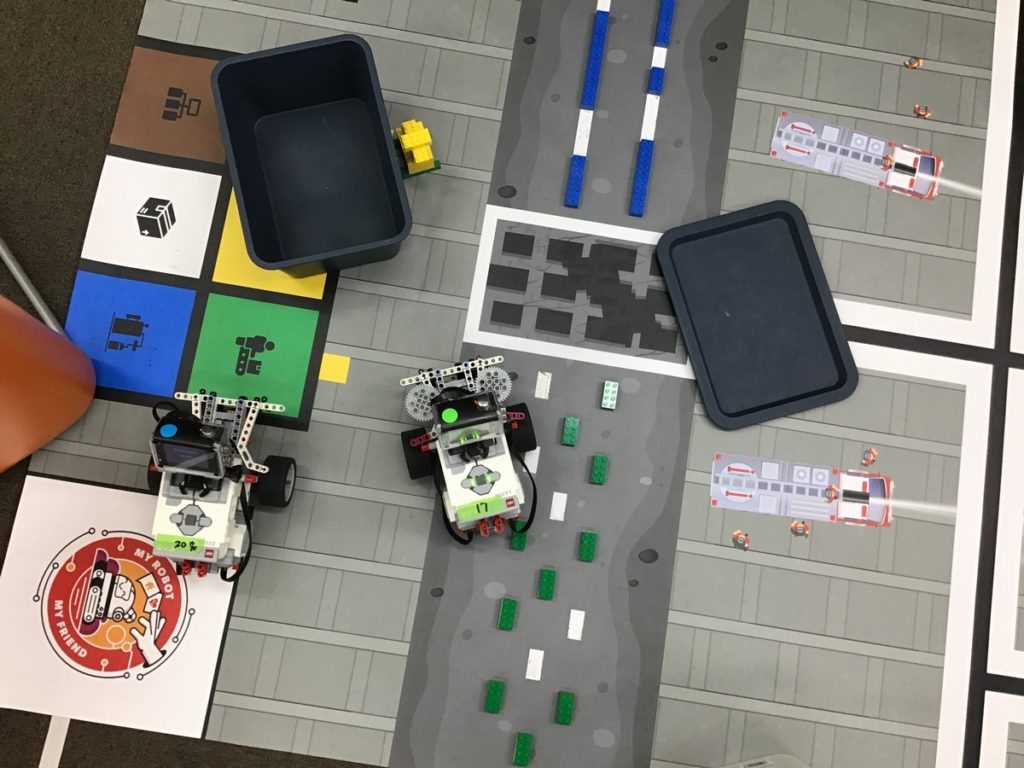
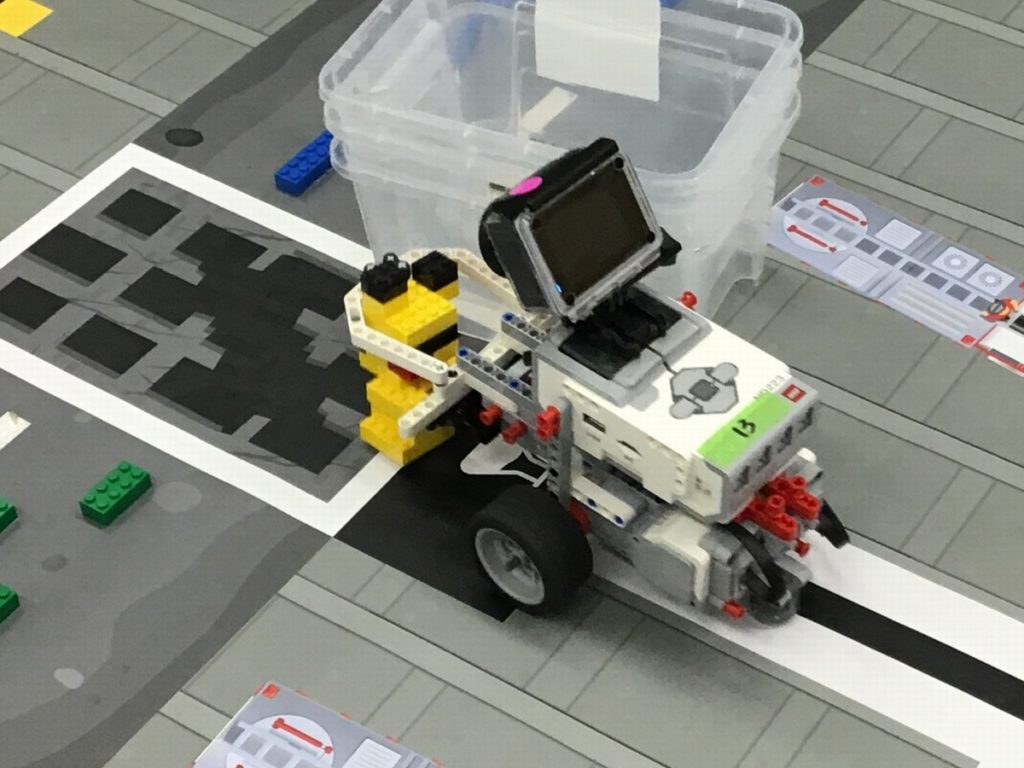
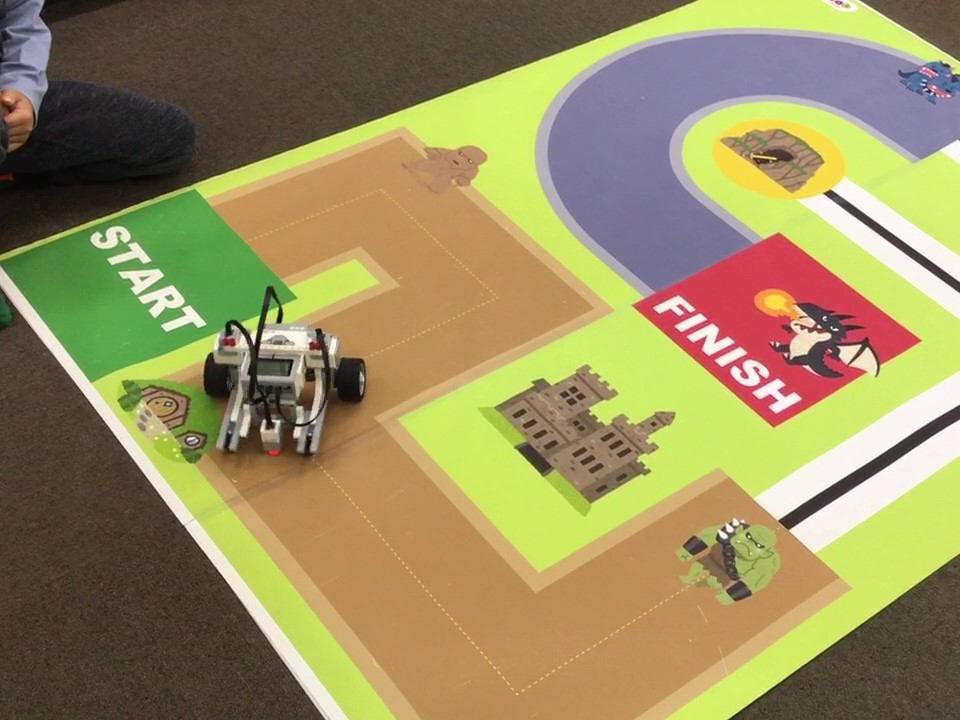
ミッションの内容は、道を外れないように進みつつ、様々なモンスターを退治し、最後はドラゴンのいるゴール地点へ。その間に伝説の剣(ソード)が洞くつに隠されているので、それをゲットしたらポイントアップ!
洞くつに寄ると少し難しくなるので、挑戦するかどうかは各自に任せました。
<洞くつに寄らないパーターン>
<洞くつに寄るパターン>
ゴーレム、オーク、クラーケン、ケルベロス、ドラゴンと闘いながら進みますが、ゲームみたいで、少しテンションが上がります。
なお、クラーケンはタコなのか?イカなのか?という疑問が生徒から寄せられましたが、どちらでも正解みたいです!