子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
春休みが明けて、先週から新年度の授業がスタートしています。
昨年度から通っていた子どもたちも1つ学年が上がり、また、新しく通い始めた生徒さんも増えたりして、新鮮な気持ちでのスタートウィークとなりました。
第1週目、どんな活動をしたのか、前後編2回に分けてご紹介します。
<ビギナー>
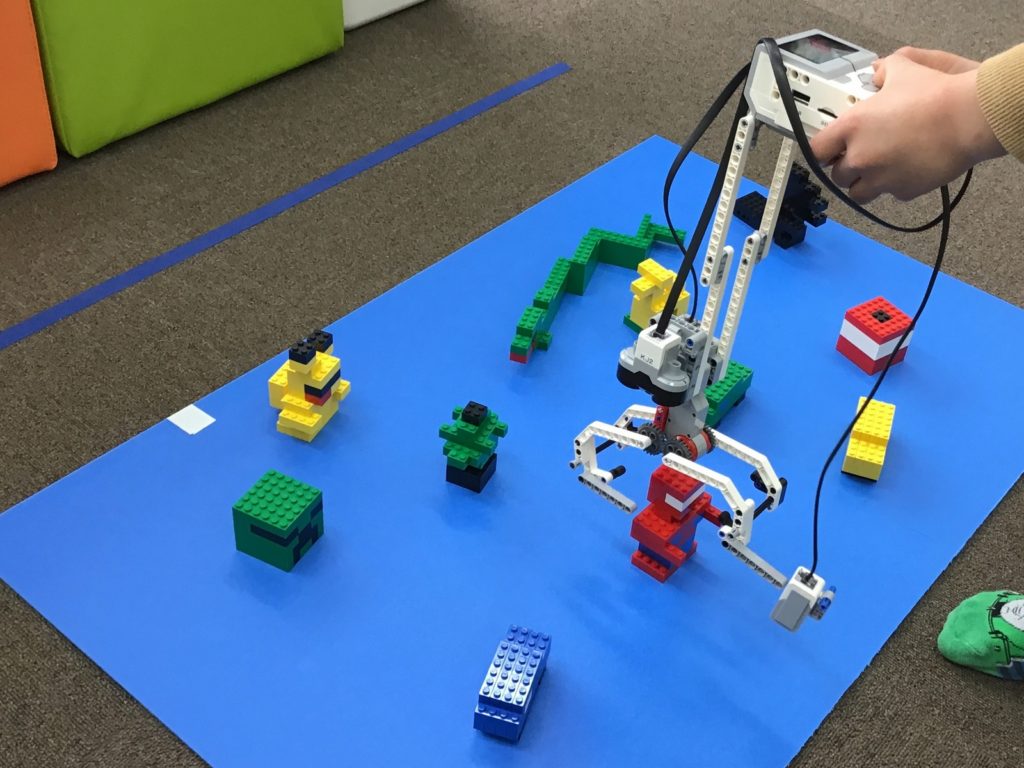
ビギナークラスでは、 大きなものをしっかりと壊れにくく組み立てる練習ということで、「とう」を作りました。
最初は丸い穴に「接続ピン」と呼ばれる小さなパーツを入れるのも一苦労だったのですが、組立てに徐々にも慣れてきて、こんな高いタワーを作ることができました!


ただ高くするだけでなく、自分の思う形みたいなものがあるようで、デザインも様々です。(デザインに凝りすぎて、全然高くならなかった子もいましたが、それもアリですね♪)
<スタンダード1>
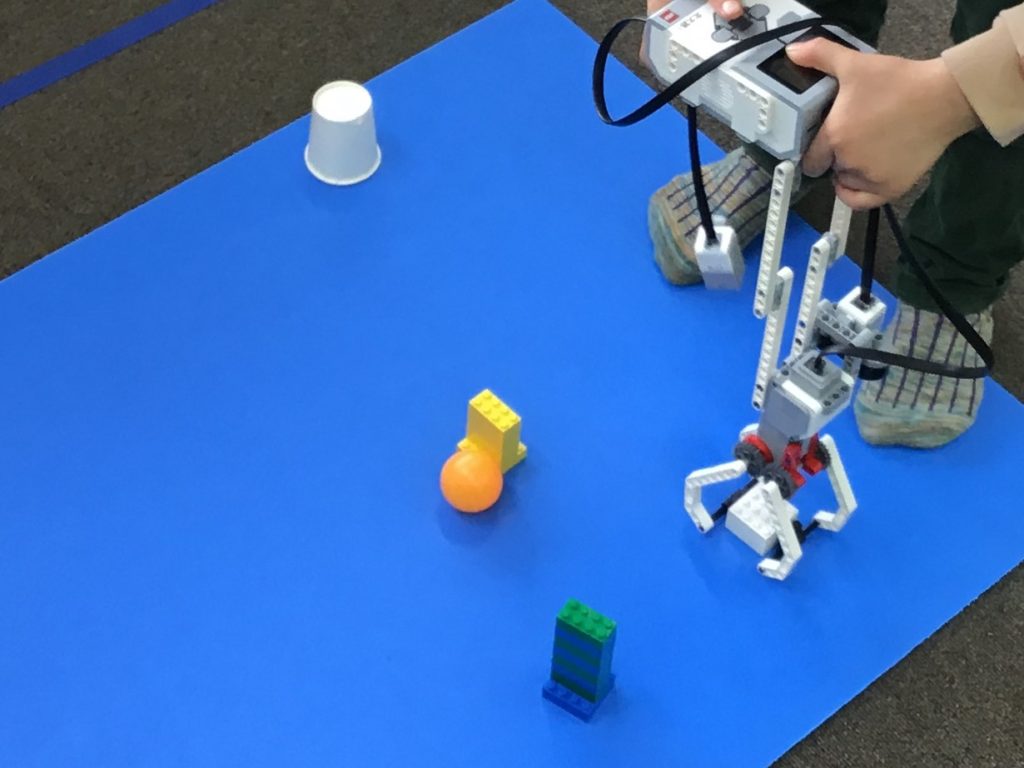
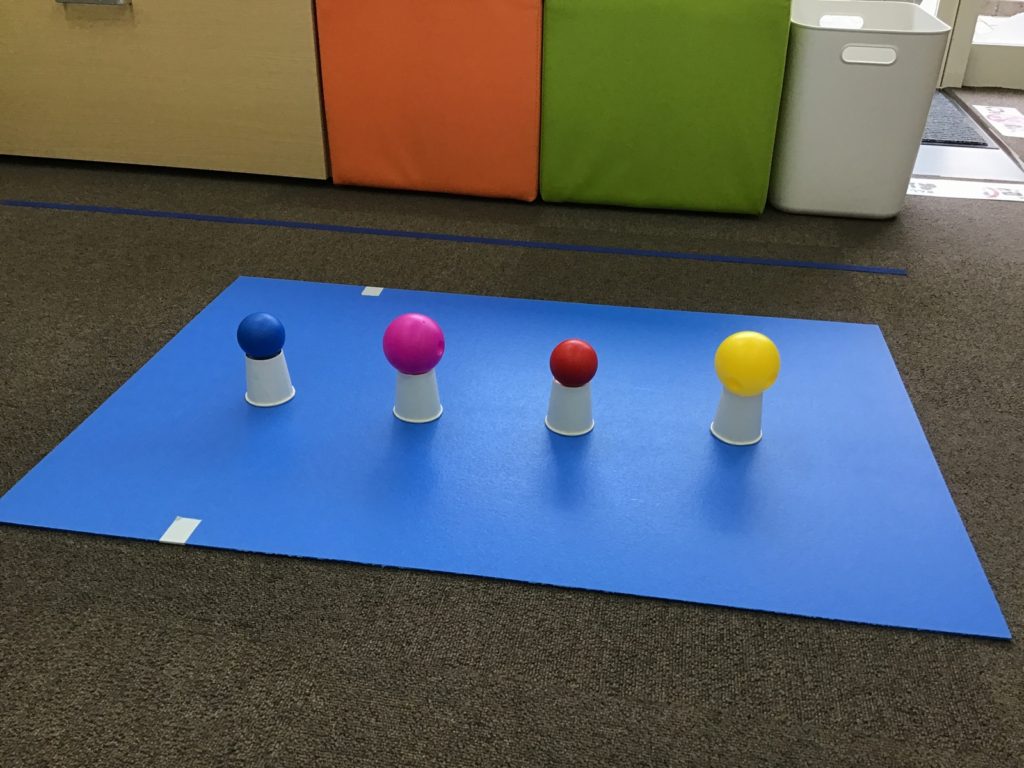
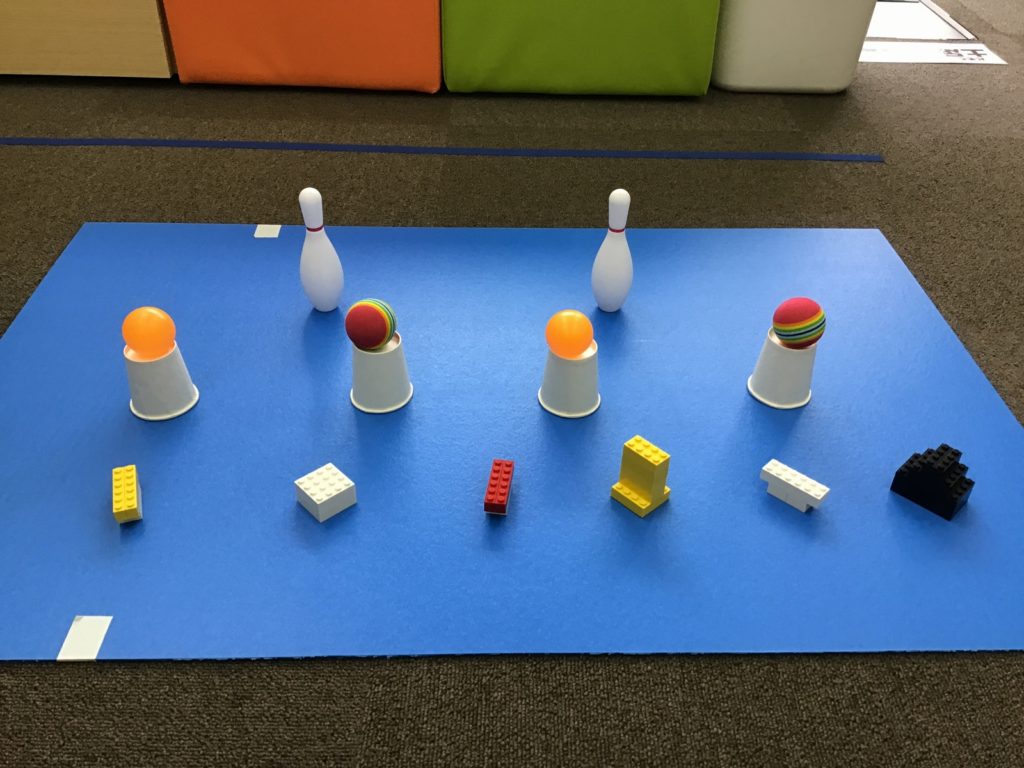
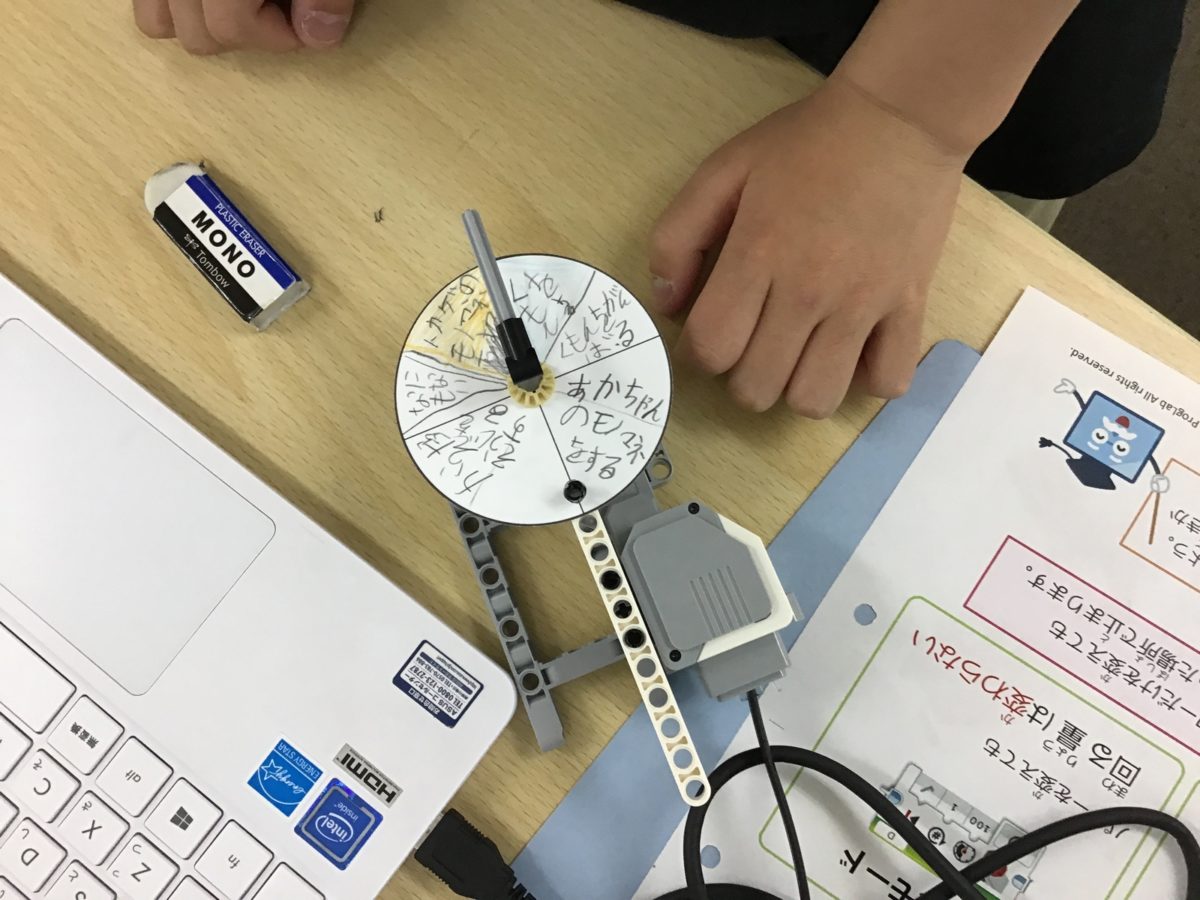
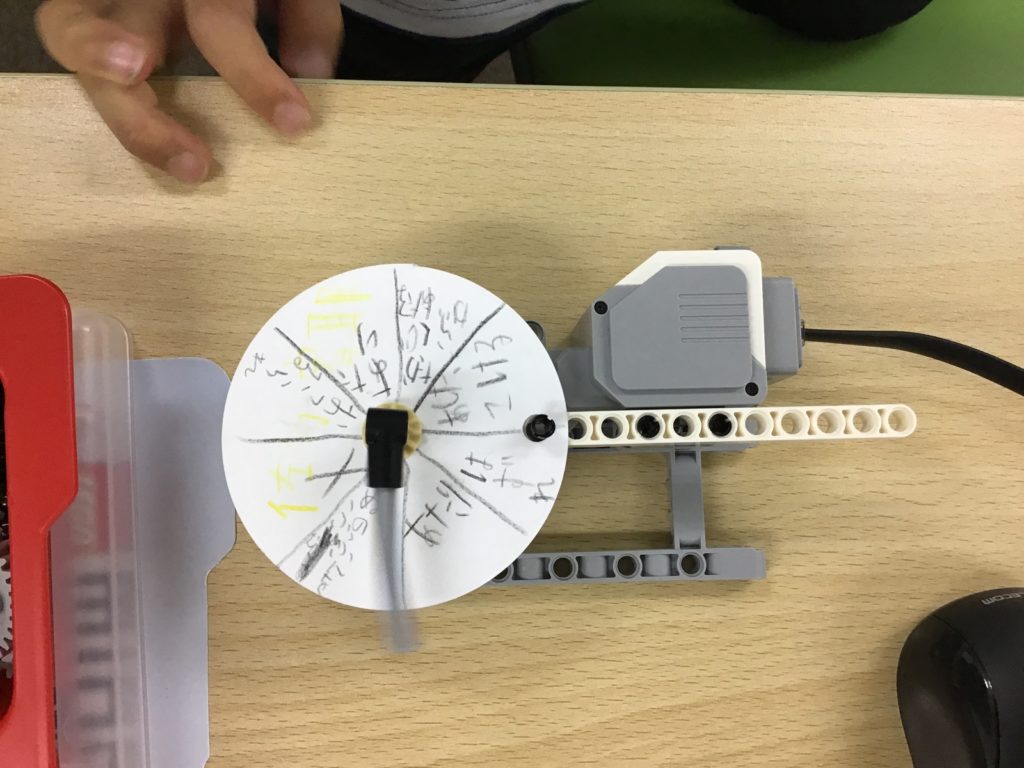
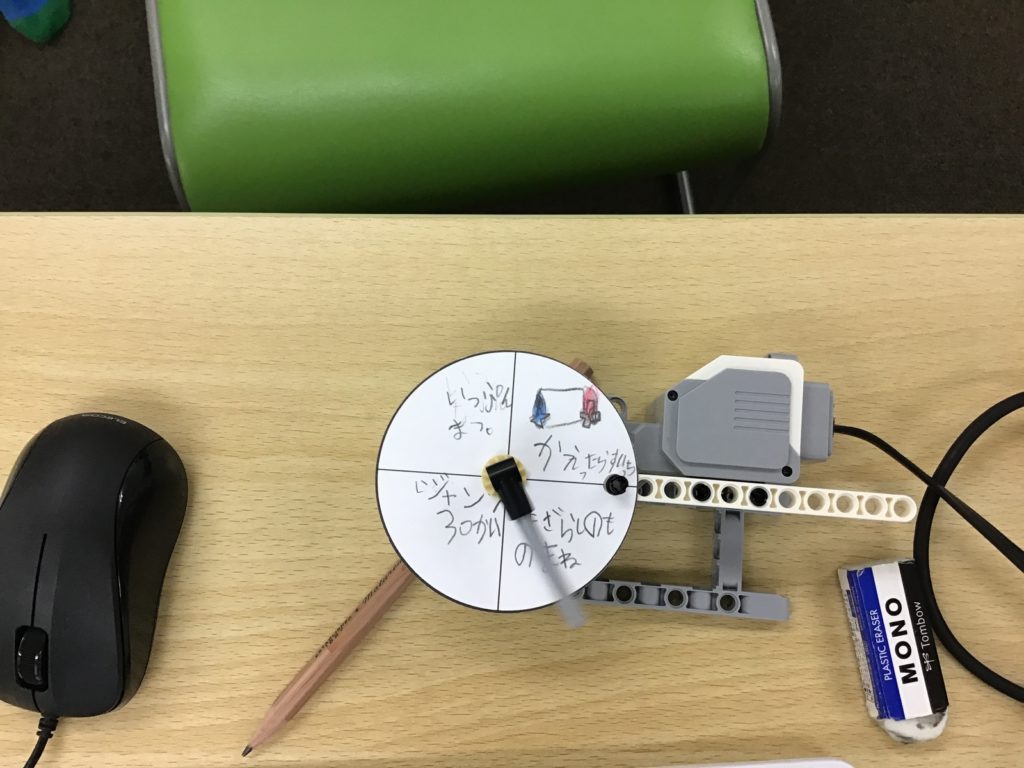
スタンダード1クラスでは、昨年度から続けて通っていた子も、新しく入った子も、初めてパソコンとマウスを使ってプログラミングをします。
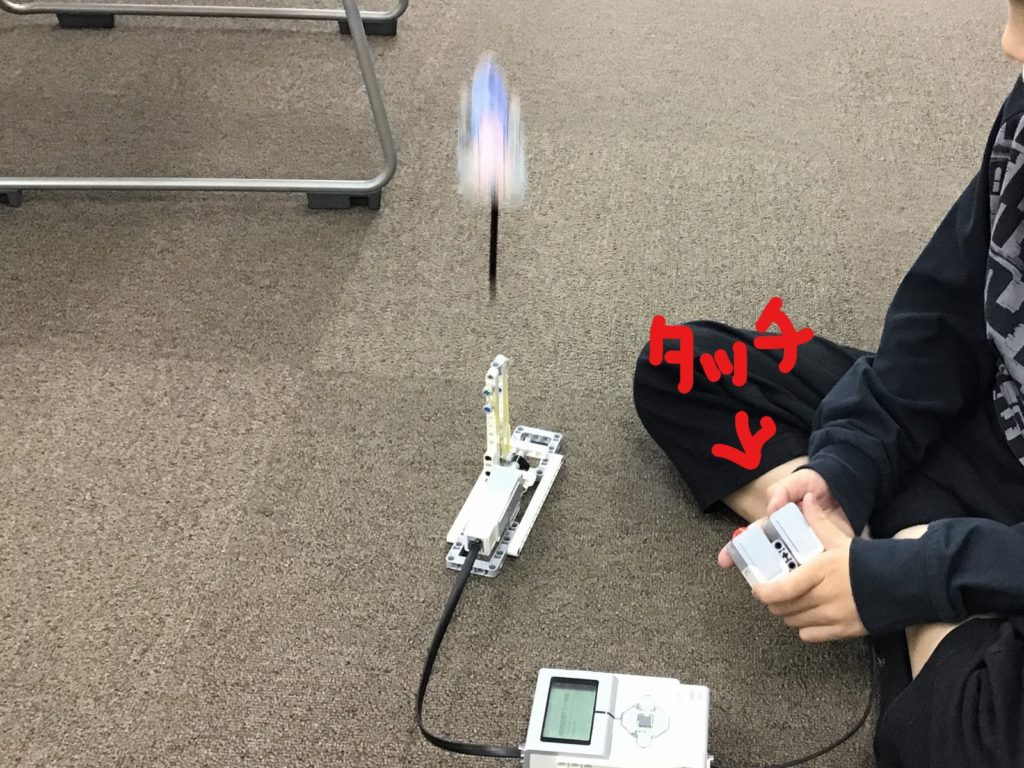
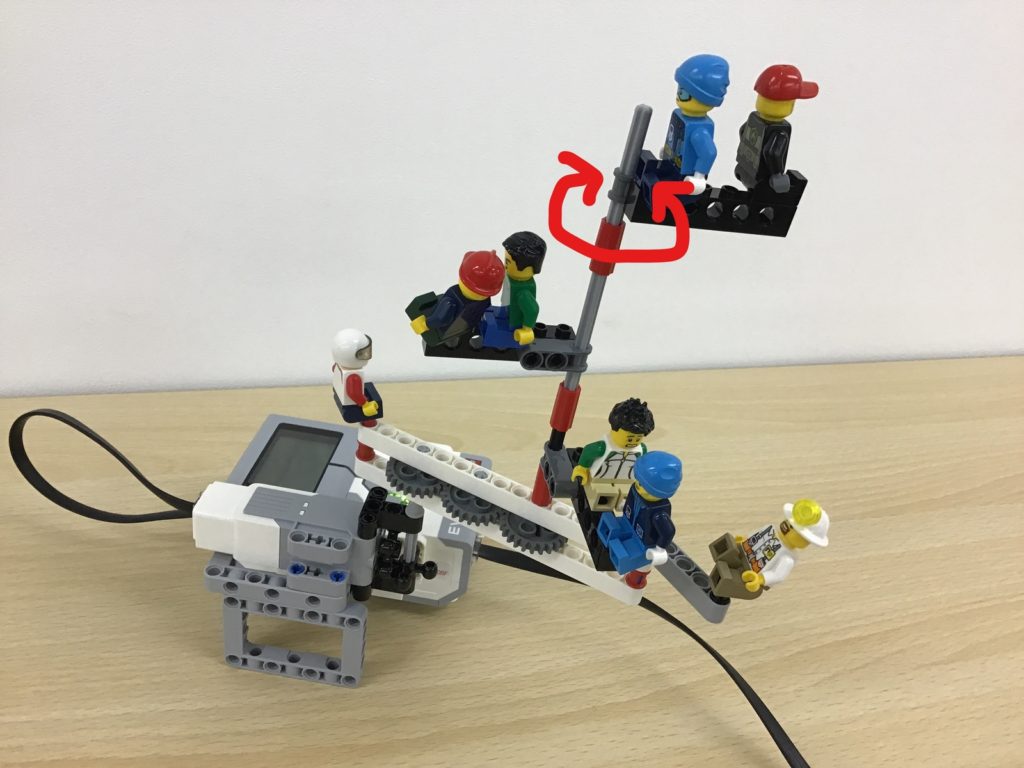
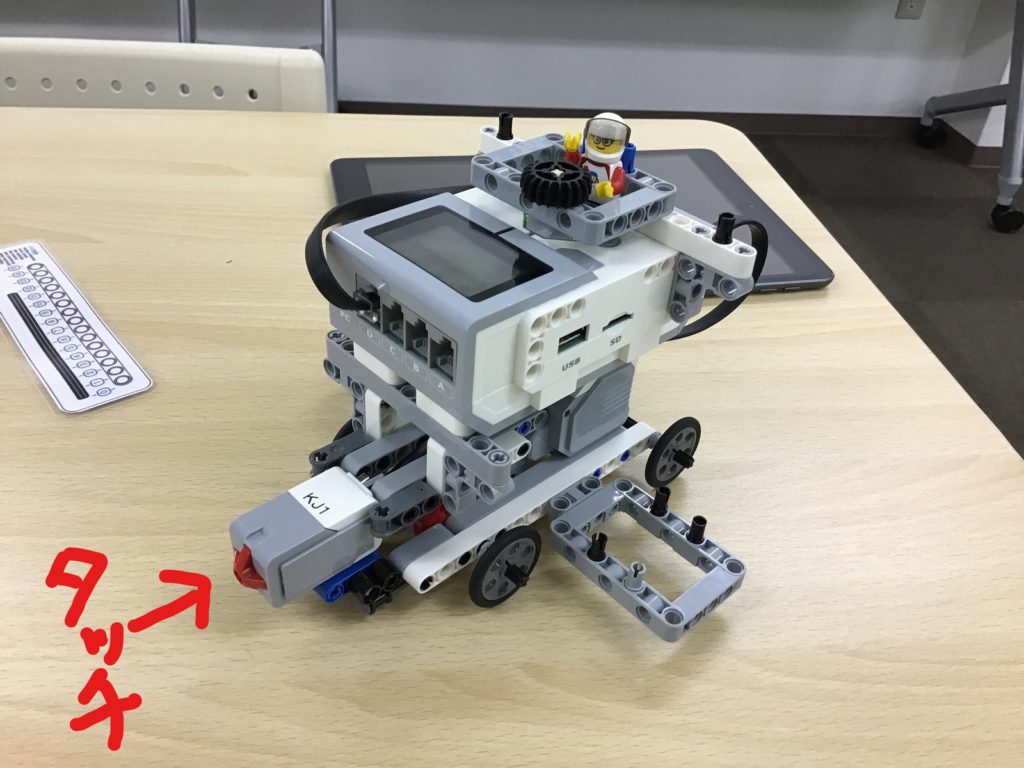
電源の入れ方、マウスのクリック・ダブルクリック、数字の入力などなど、なかなかスムーズにはいかないこともありましたが、「ルーレット」を作って、何度も動かす中で、少しずつパソコン操作に慣れてきました。
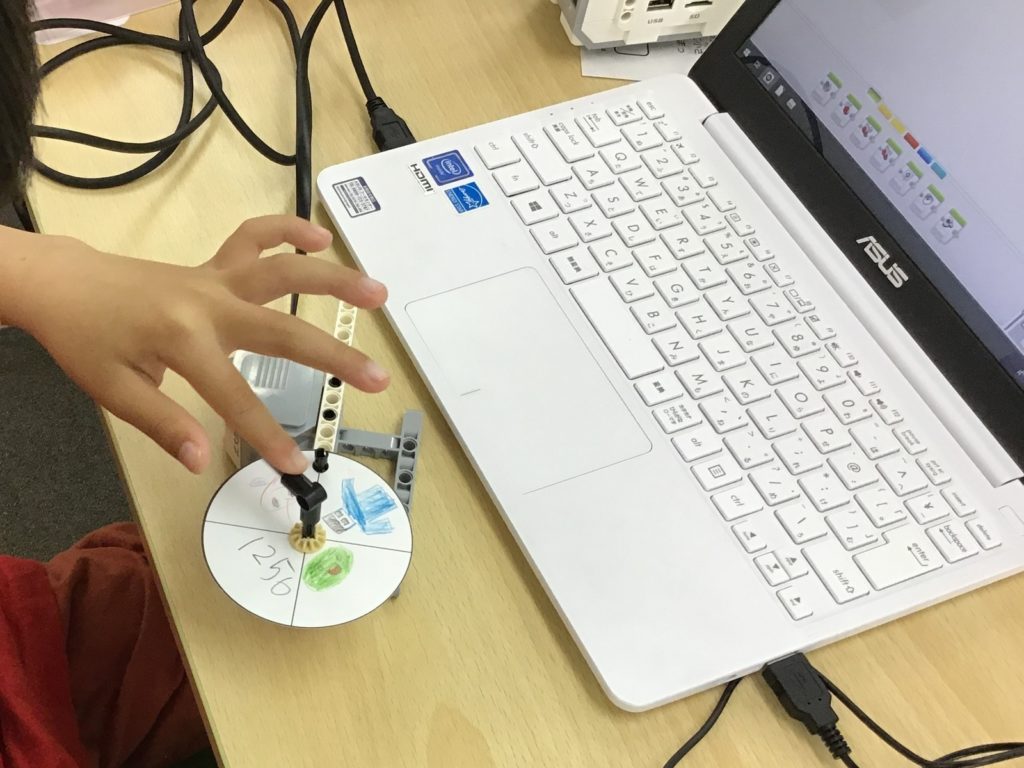
と同時に、自分の考えたルーレットを、同じクラスの子や、先生に遊んでもらう中で、ぐっと距離が近づいて、少し引っ込み思案の子も自然と話ができるようになっていました。
さて、後編では、スタンダード2以降のクラスでの活動をご紹介します。(後編へ続く・・・)