子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
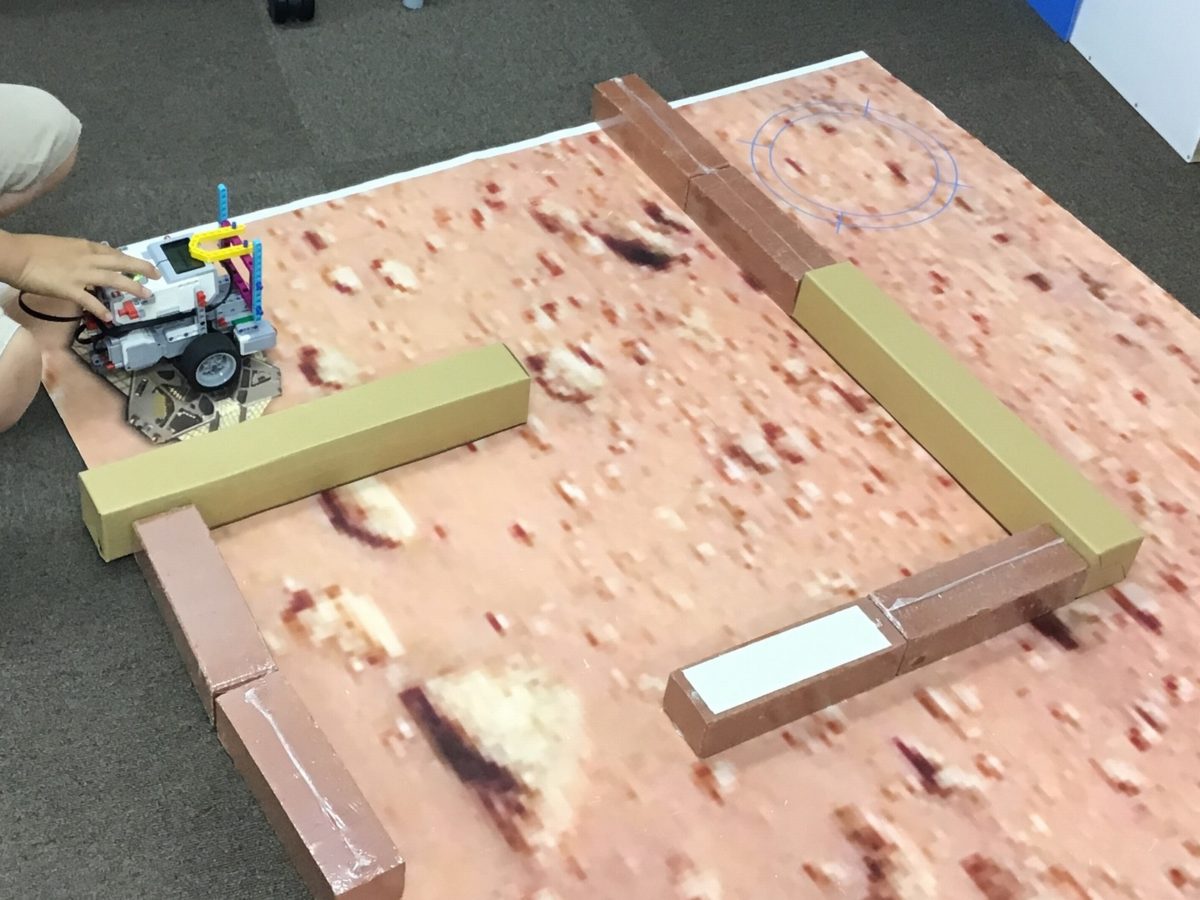
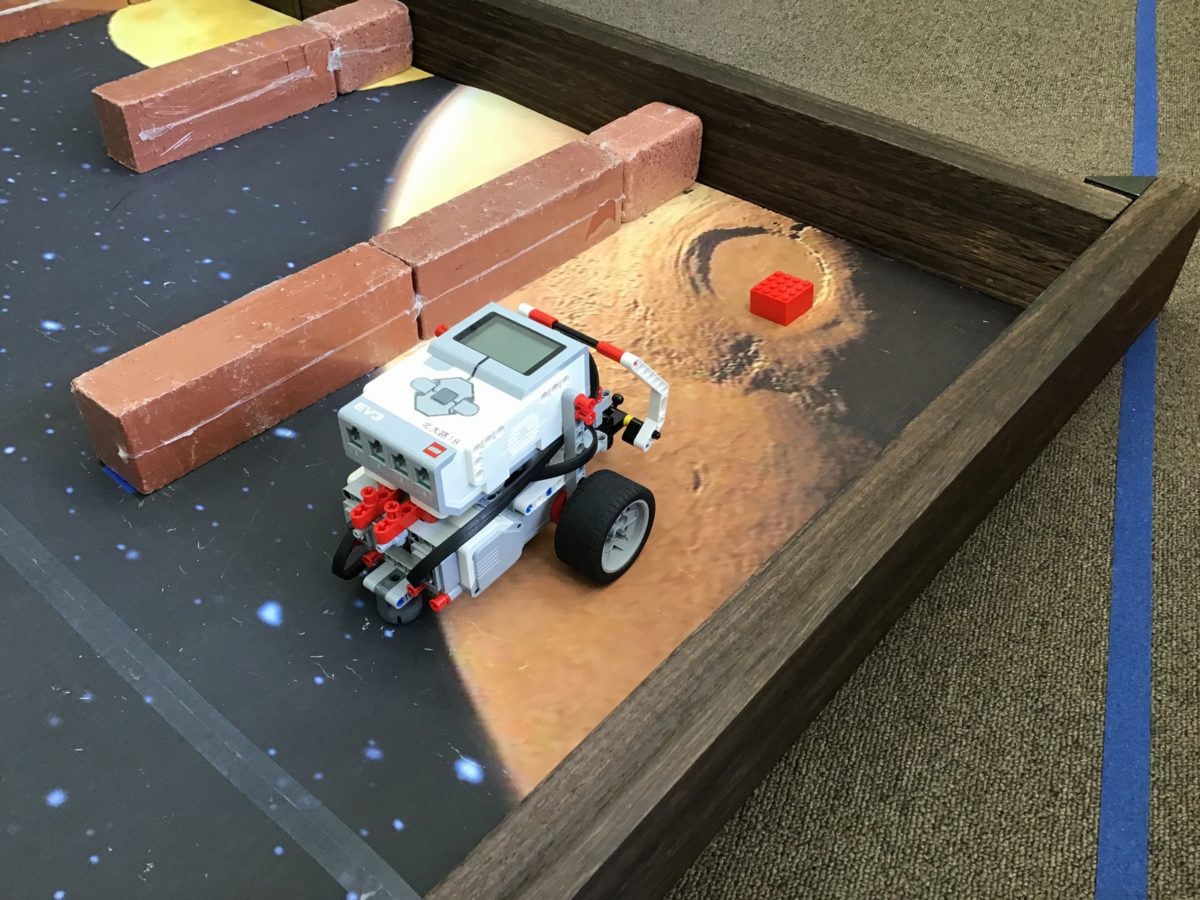
スタンダード2コース、これまで4月「ロボットで火星へ行って、火星の石を地球に持ち帰る」、5月「火星に着陸した探査機が障害物を避けながら、途中で火星の石を採取する」の2つのミッションをご紹介しましたが、いよいよ6月は火星シリーズの最終ミッション
「火星の電車“火星ライナー”で環状線を一周する」
に挑戦しました。
※追加のミッションとして、最後から1つ手前の駅にいる駅員さんを、青い車庫に連れて行くというものにも挑みました。
ロボット競技で最も大事な技術の1つ、【ライントレース】のプログラミング学び、それを用いたミッションとなります。
ライントレースとは、白い床に黒い線を引いて、下向きに付けたカラーセンサーでその黒線を探し、辿りながらすすむ技術です。
成功するとこんな感じです!
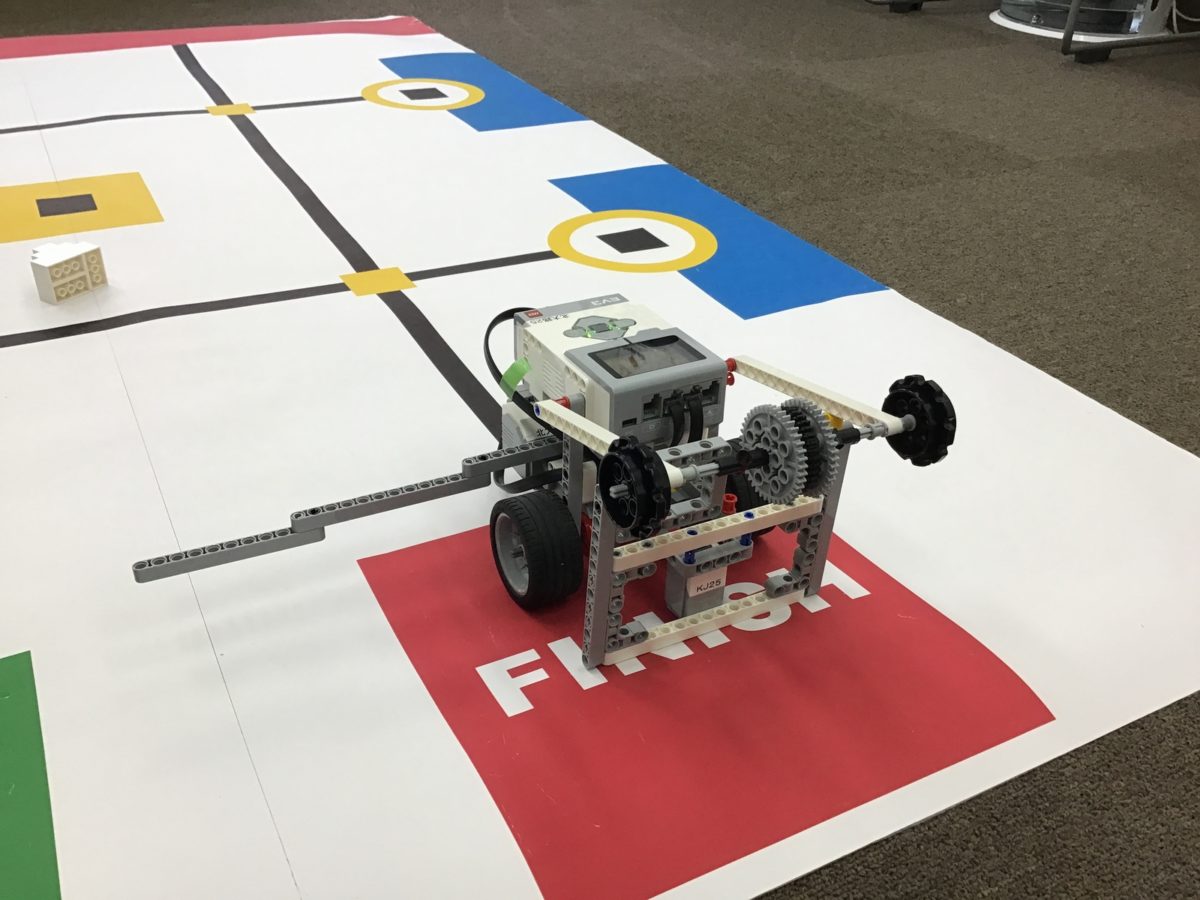
駅員さんを車庫に連れて行くのに改造が必要で、これまで2か月の経験を活かして、各自が考えて改造しました。
みんなのアイデアを、いくつか見てみましょう!
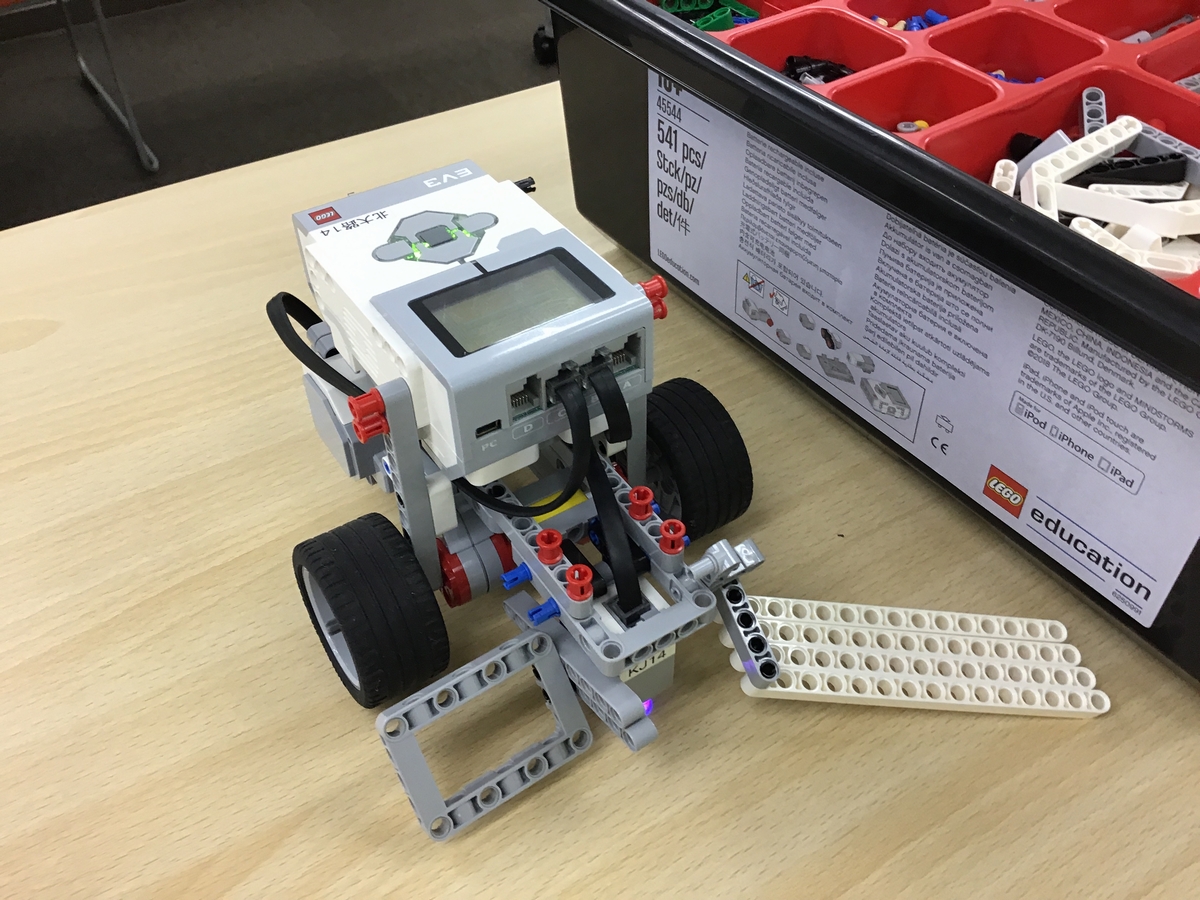
車体の右側に腕を拡げるような改造が一般的でした。
ただ、それだけだと曲がって車庫に入る時に、せっかく運んだ駅員さんをタイヤで踏んでしまう場合があるので、タイヤのガードを付けたのがポイントです。
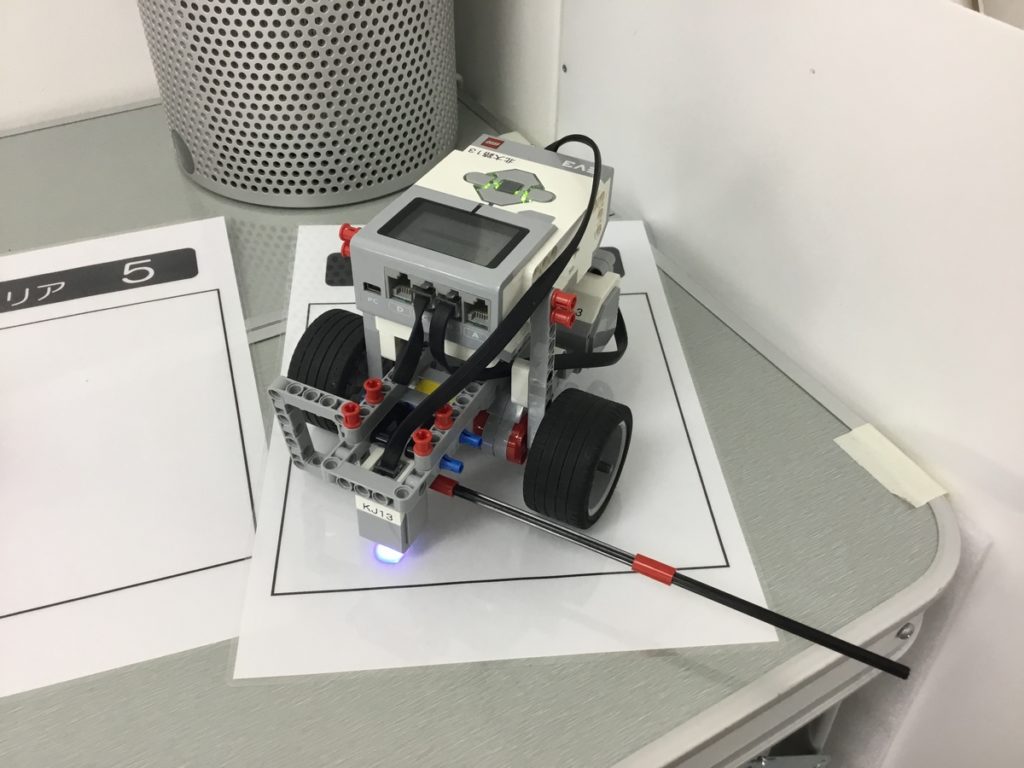
ものすごくシンプルな改造です。(これを考えた生徒さんは、いつも必要最小限のシンプルなものを考えてくれます。)
1本の棒(シャフト)が駅員さんを運ぶアームとタイヤのガードの両方を兼ねています。

アームを後方に付けるアイデアです。
タイヤの後ろで運ぶので、これで駅員さんがタイヤに踏まれてしまうことは無くなりそうです。

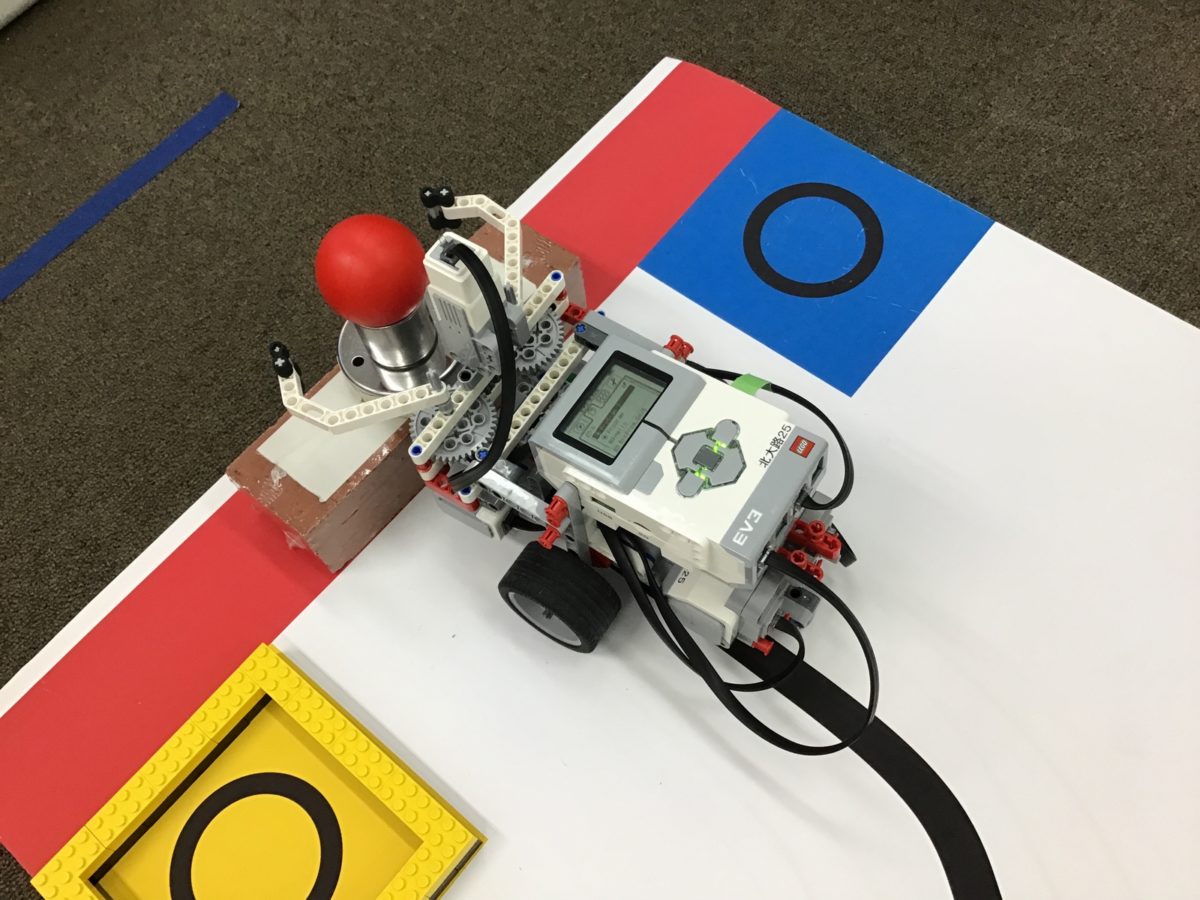
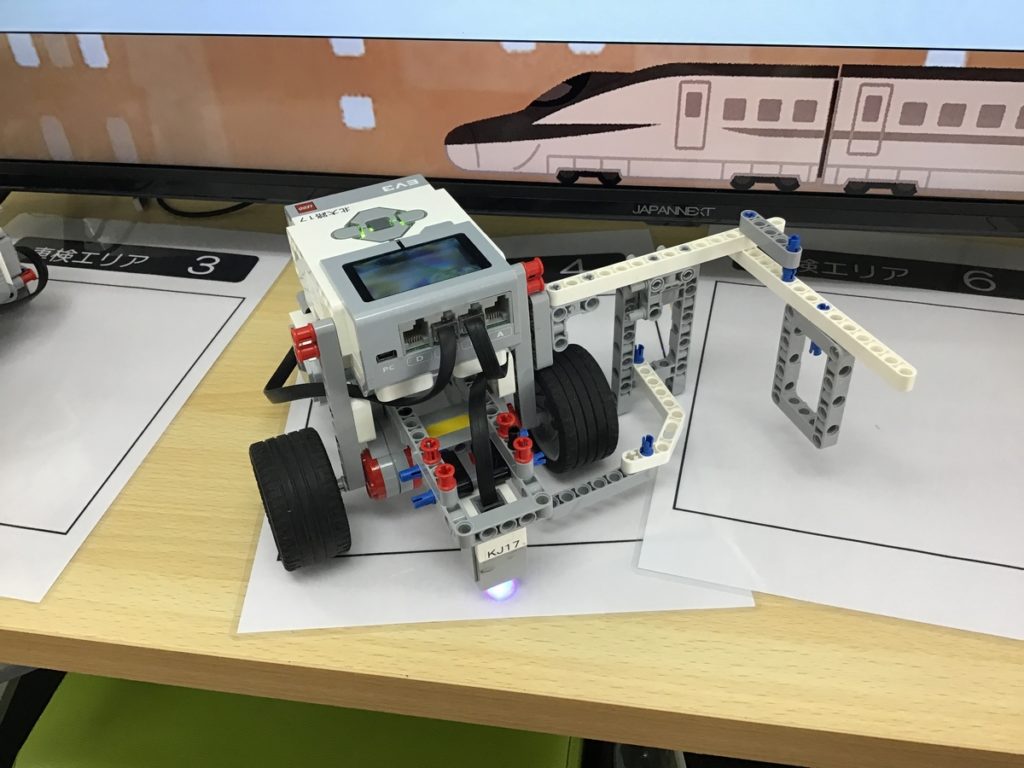
一方、車体の前方にアームを付けるアイデアです。
装飾性もあって、ミサイルやレーダー?がついていたり・・・
ブルドーザーの様に押す部分につけたギザギザ、これが引っ掛かりになって、駅員さんを落としにくく、いい仕事をしてくれていました。
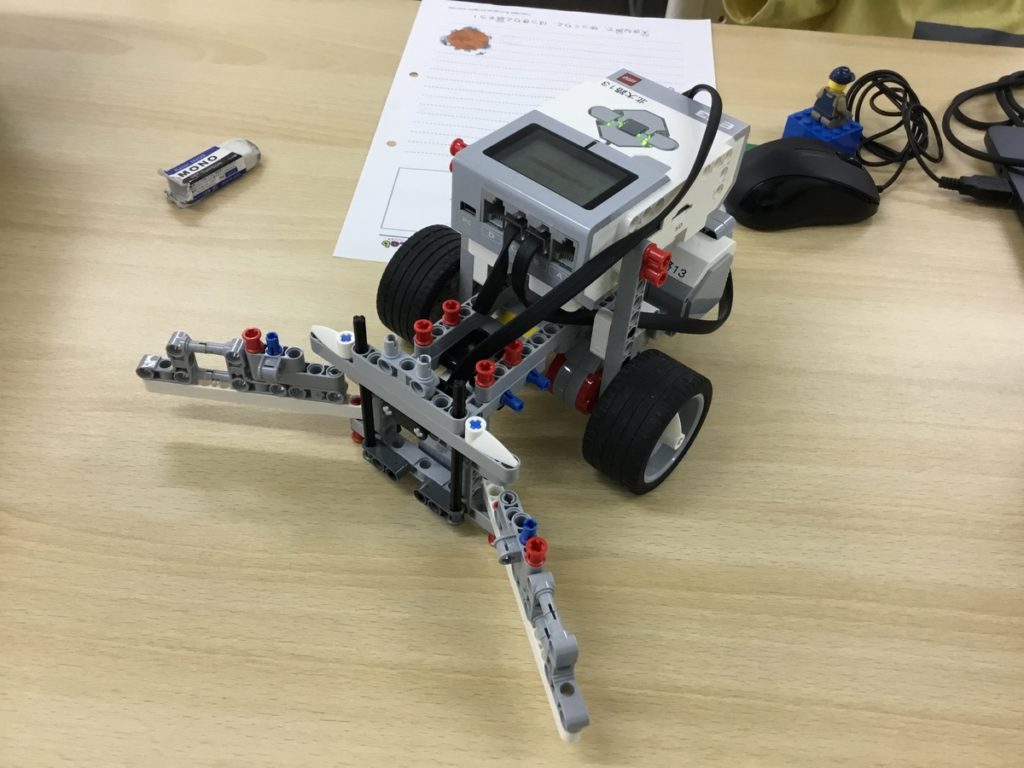
意外と思い付かない、アームを斜めにするアイデア。
斜めにすることによって駅員さんを内側に寄せて、しっかり運ぶことができると、本人も競技後のプレゼンテーションで発表してくれました。
ここまでのミッションでいっぱい失敗しましたが、このミッションが上手くいって、自信を付けた生徒が多かったように思います。
「失敗を恐れないで挑戦する気持ち」に、少しでもつながればと期待しています。