子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
先日の記事で紹介されていた比例制御のライントレース、スタンダード2コースで、これを実践する『火星開拓ミッション(Phase1)』に挑戦しました。
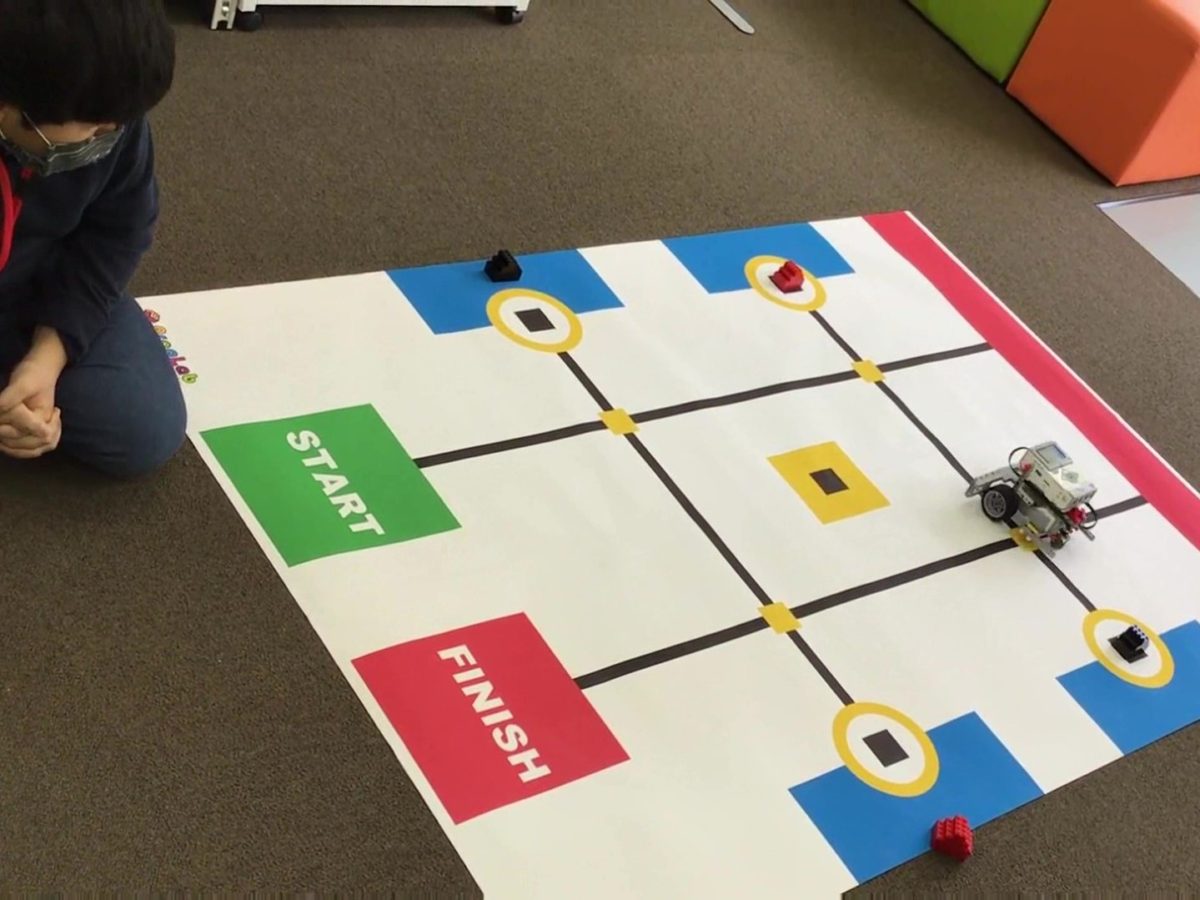
ミッションの内容は、火星の農地予定地にある邪魔な岩を、予定地から押し出すというものです。4つの農地の4つの岩を押し出したら、ゴールに帰ってきます。
このミッション、岩を押し出す順番は決まっていませんので、各々がやり易い(効率的な?)順番でミッションクリアできるよう、作戦を立てました。
順番の違いがおもしろかったので、ご紹介したいと思います。
<タイプ1>
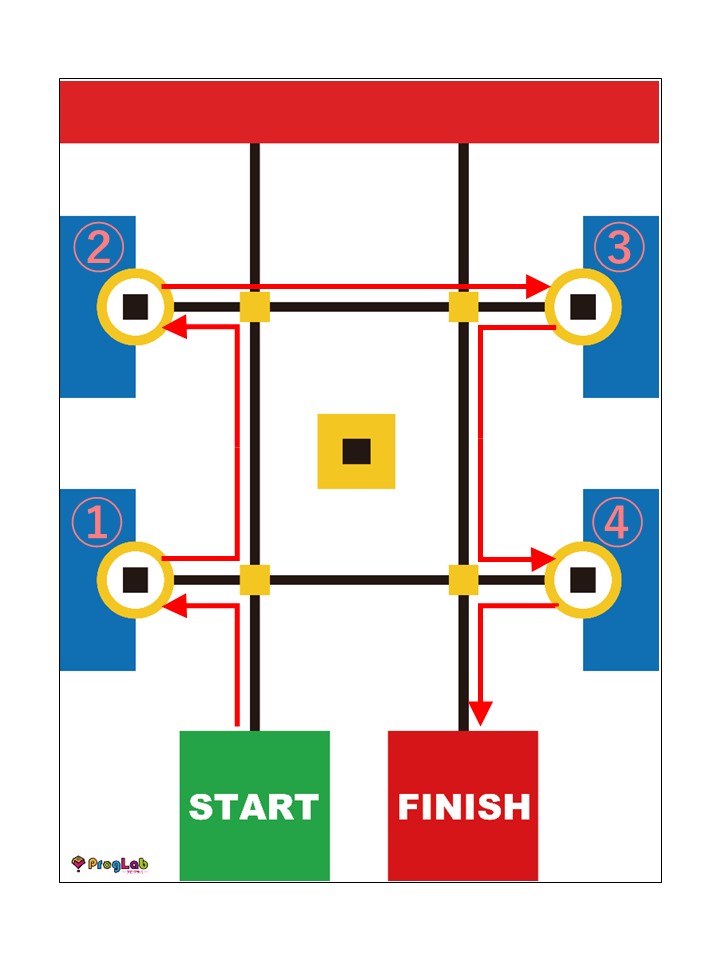
その時にいる場所から近い順番に処理するタイプ。移動距離が最も短いので、一番オーソドックスで、普通に考えたらこの順番かな。と思うのですが・・・
<タイプ2>
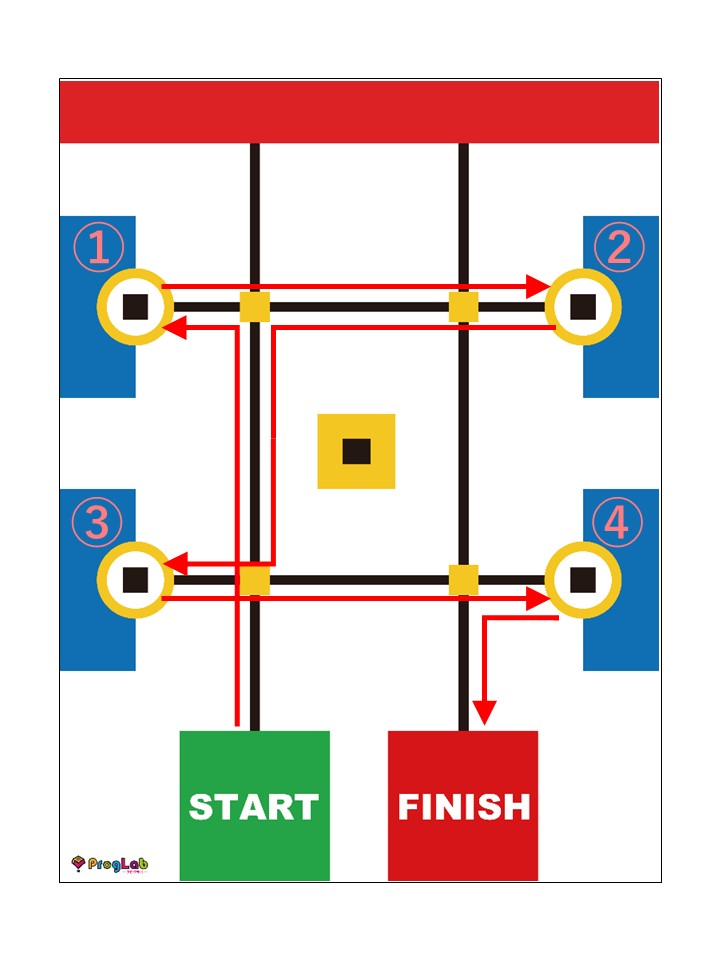
ゴールから離れた方から処理するタイプ。移動距離は長いですが、その分、ライントレースも長くなるので、動作が安定します。
<タイプ3>
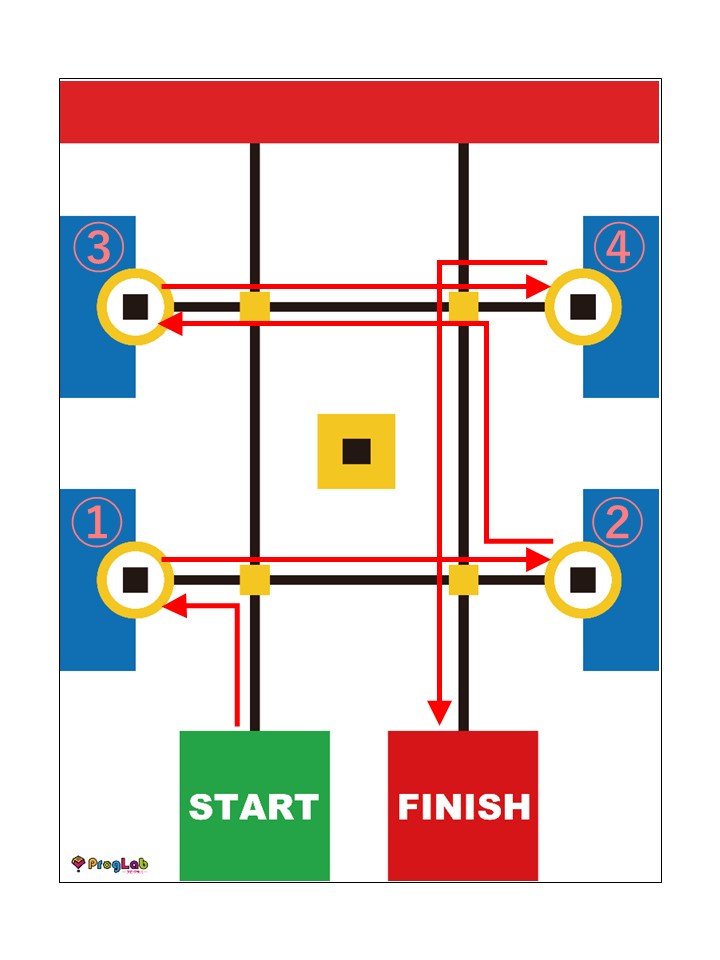
このチームはユニークで、(こちらの意図に反して)いわゆる「ライントレース」をしません。黒い線を外れないように曲がりの 微妙な調整をしています。ですので、なるべく方向転換の回数が少なくなるように、前進した後に(転回しないで)そのまま長くバックをするようなルートになっています。
色々な作戦があっていいのですが、ルートの比較をしていると、「好きなものから先に食べるタイプか、嫌いなものから先に食べるタイプか・・・」というのを想起してしまいました。