WROの国際大会が3年ぶりにリアル開催されることになりました。プログラボからは今年度から新たに始まった、ロボスポーツ部門のダブルテニス競技で、チーム「ちゃんぽん(CHAN-PON)」が、ドイツ・ドルトムントで開催される国際大会へ出場することとなりました。
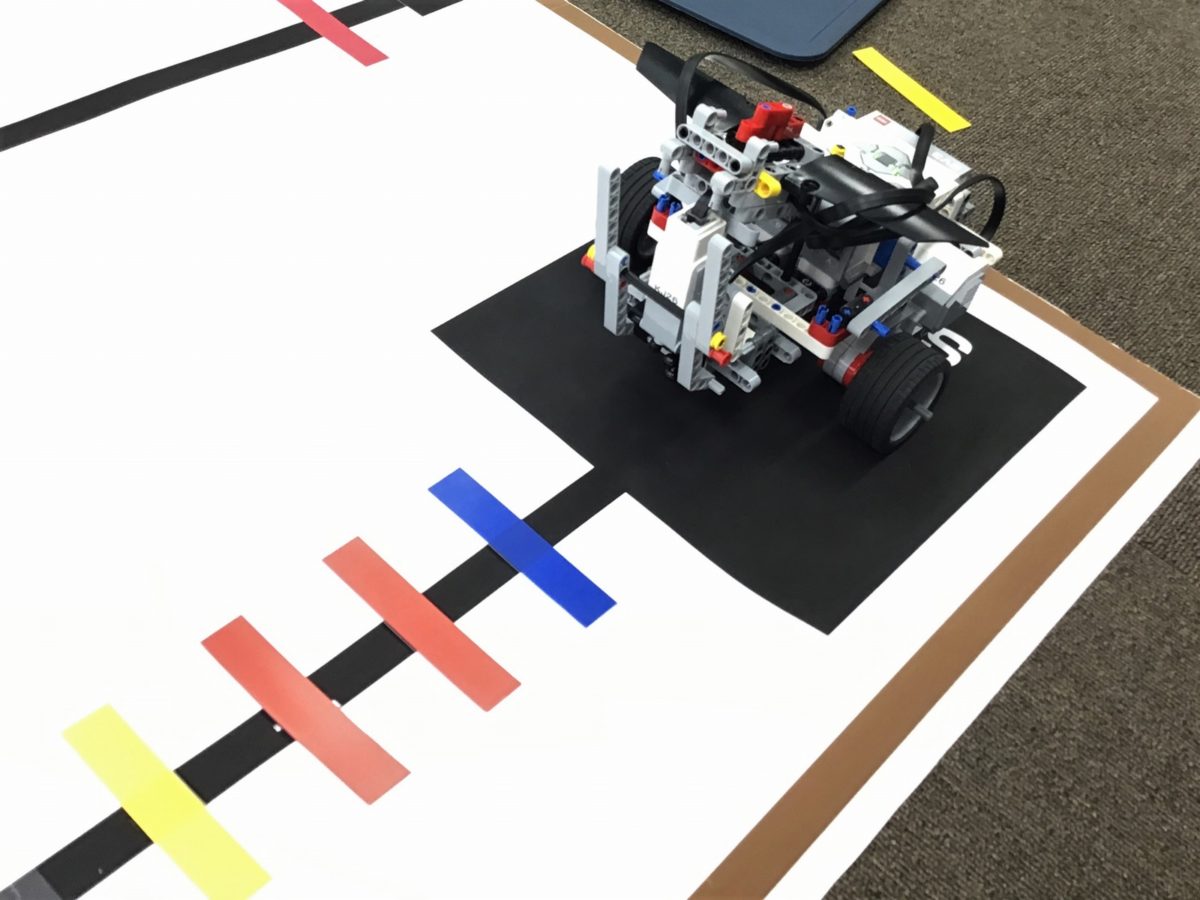
昨年まではフットボール競技として開催されたいたカテゴリーが一新され、このロボスポーツ部門となったのですが、ピンポン玉を使ったり、AIカメラで認識を行ったりと、子ども達にとっても挑戦しがいのある競技内容になっています。
2019年にハンガリー国際大会に出場し、それから3年経ってますので、過去の記事を見返したりもしながら準備を進めてきました。まずは準備編として備忘もこめて出国前に書き残しておきます。
■コロナ対策
あの時から大きく変わったのは、やはり新型コロナウイルスに関することです。現時点でもまだまだ世界中に影響を及ぼしていますが、渡航手続きから現地での対応まで、様々な面でコロナ対応を求められます。
ドイツ入国時には入国規制が緩和されているため、特に証明書等は必要ありませんが、帰国する際のドイツ出国時には、ワクチンを3回接種済みの接種証明書か、出国72時間前の検査陰性証明書の提示が必要となります。接種証明書は自治体で発行、もしくはマイナンバーカードがあれば接種証明アプリで即時発行できます。
ドイツでは公共交通機関ではFFP2(N95相当)のマスクの着用が義務づけられ、競技会場でも推奨されています。まだ実際に現地に到着していないので競技会場の様子などは分かりませんが、競技中もいろいろと気を配りながらになるでしょう。
とにかく皆が無事に帰国できることを願うばかりです。
■機材
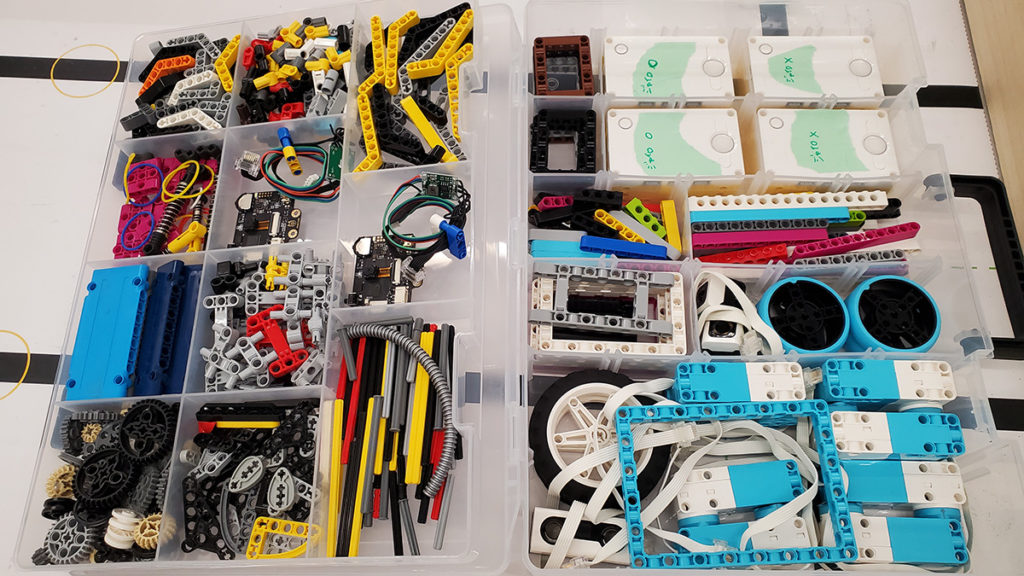
今回は全カテゴリーでロボットは組み立て済みのものを持ち込んで良いのですが、元々ロボスポーツは組み立て済みの持ち込みで良いルールでしたので、運搬方法をどうするか考えました。ロボットはホームセンターで販売されているコンテナケースがちょうど良さそうでしたので、少しロボットをバラした状態で2台を収納。(ロボスポーツは20x20x20cmサイズのロボットを2台使います)
予備パーツもホームセンターで購入したパーツケースに入れていくことにしました。ロボットのコンテナケースはちょうど機内持ち込みができるカバンに入るサイズで、いい感じに運搬できそう。パーツケースも写真のようにSPIKEハブがちょうど収まる、ぴったりのものが見つかりました。
予備パーツは基本的に破損したときの予備の考え方ですが、これだけ入れてもまだ、やっぱりタイヤはあと2コ入れておいたらよかった・・・とか、思ってしまいます。
 ロボットに使っていないパーツもいろいろ入れたけどキリがないですね
ロボットに使っていないパーツもいろいろ入れたけどキリがないですね
現地のコンセントはCタイプのプラグでいけるそうなので、ハンガリーの時のものがそのまま使えます。ただ今回はSPIKEを使っているので充電器関係は、USBタイプで一度に4つまで挿せるやつを購入しました。予備本体も充電しておけます。
盗難防止の意味も込めて、チームのネームステッカーもそれぞれの機材に貼っておきます。今回のチーム名は国内ではちゃんぽん、海外ではCHAN-PONの表記です。
チーム名をつけるときは、いつ国際大会に行ってもいいような名前にしておきましょう。
 中央のプラグのRobotTKTは前回のなごり
中央のプラグのRobotTKTは前回のなごり
■身の回り品
2019年のハンガリーの思い出と言えば、やはり食事が合わなかったことです。今回はそれを踏まえて、お菓子やみそ汁、緑茶など、けっこう多めにカバンに詰め込みました。お菓子なんかは、あまりそうなら他のチームとのグッズ交換で使ったりもできますし。
グッズ交換で必要となる缶バッジも200個制作しました。また、競技会場は20℃ぐらいに設定されているそうなんですが、代表チームTシャツだけでは心もとないのと、競技ではオレンジ色のピンポン玉を使用する関係上、AIカメラで色認識する際にオレンジ色の服はクレームの元になりそう。そこでチームウェアとして、ユニクロのセール品に、日本国旗のワッペンを縫い付けた、特性ユニフォームを制作!(WRO Japanからは許可を得ています)
けっこう海外チームはこういった揃いのジャージを着ていたりしてます。
 本物のオリンピック選手みたいと好評
本物のオリンピック選手みたいと好評
出発は明日11月16日の午前中です。本日15日は明日の時間の関係上、成田で前泊をしてからになります。帰国は来週の月曜日になりますので、まるまる1週間の旅となります。
はじめての競技で海外チームがどんなロボットを作ってくるのかとても楽しみですし、そこで見て感じたことをプログラボだけでなく、国内のロボスポーツ競技発展のためにもたくさん持ち帰ってこようと思います。
若田