プログラボ野田阪神の岡田です。
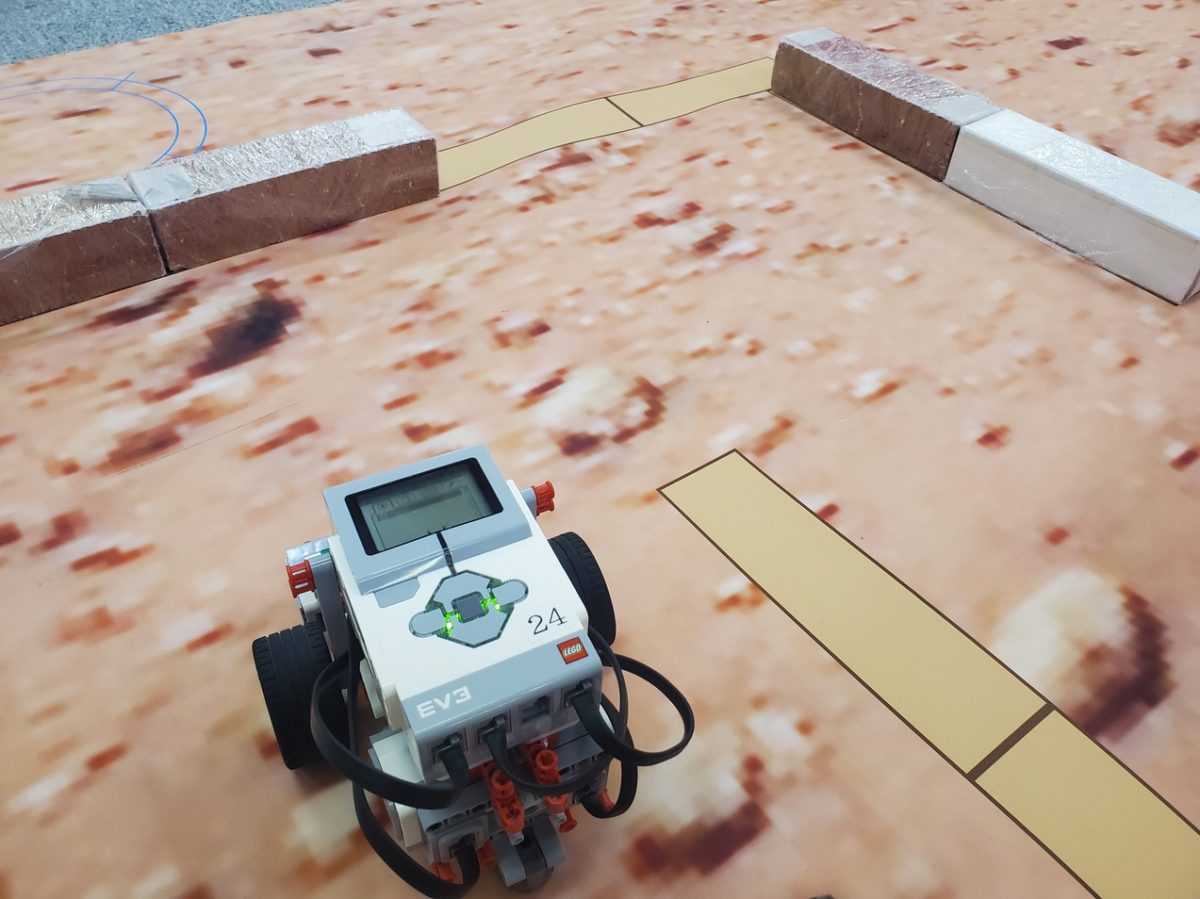
今週のスタンダード2では、距離を測定する超音波センサーを使ってゴールを目指す、ロボットミッションに取り組みました。
車型のロボットを走らせる場合、今まではモーターの回転する量を調節して動かすことが多かったですが、センサーを使うと周りの状況を調べることができるので、今回はその仕組みを利用しています。
ミッションでは、コース上のレンガにぶつからないように、ロボットを手前で止める必要がありました。大事なのは、何センチ手前で止まれば良いかを考えることです。ロボットはその距離になるまで走り続けるので、あまり近すぎるとぶつかってしまう可能性も…。
プログラムの数字を何度も調整し、ロボットがきれいに動くようになりましたね!
順調かと思いきや、ロボットがレンガに引っかかり、上手く曲がれず「あーー!!」という声が出てしまう場面もありました。友達同士で相談してプログラムを調整するなど、クラス全体で楽しく、そして集中して取り組むことが出来ていました!
最後に発表会をしてこの日の授業は終了しました。
自分の番を頑張るだけでなく、友達の発表を応援している姿も素晴らしかったです✨
来週も面白いミッションにチャレンジしますので、楽しみにしていてくださいね♪