子ども向けロボットプログラミング教室プログラボのブログ担当です!
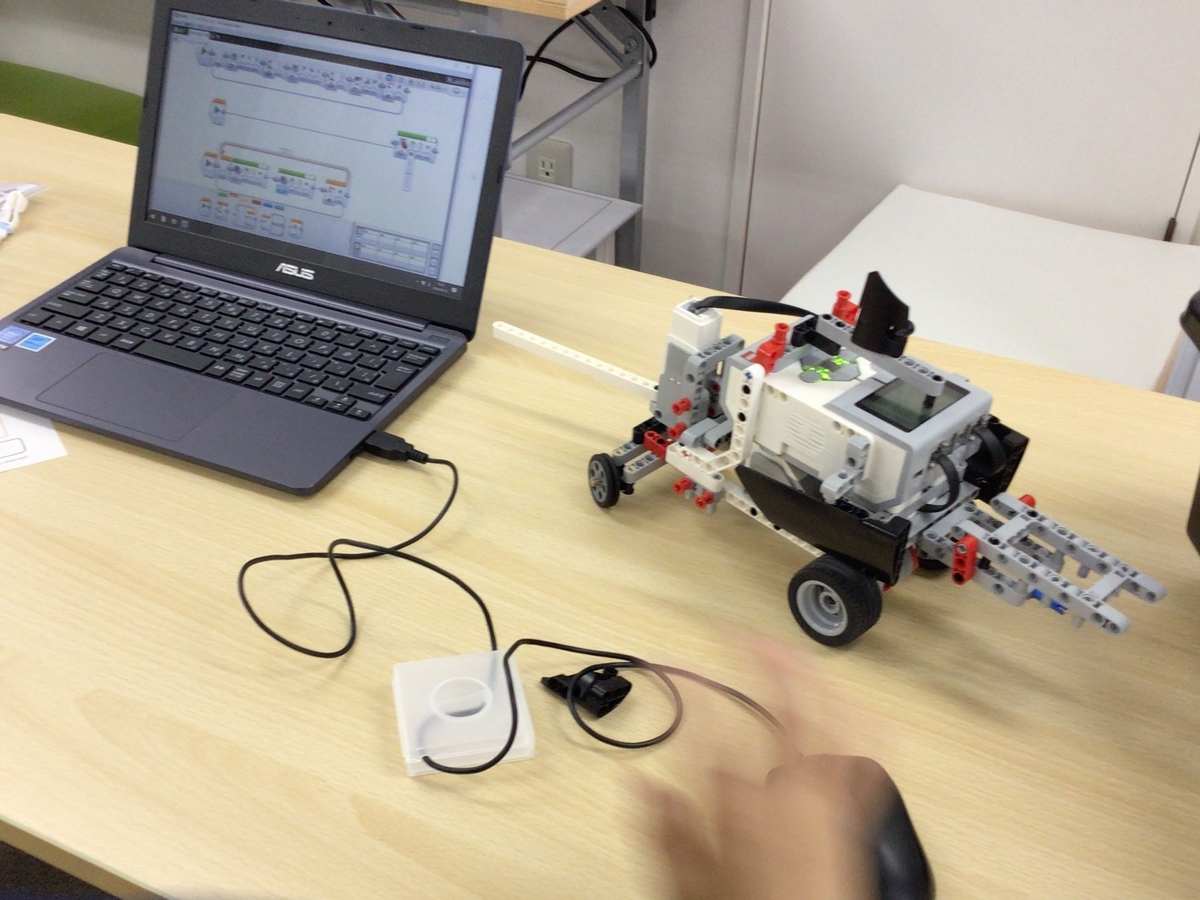
プログラボ独自のロボットコンテスト【プログラボカップ(PLC)ミドル競技】に挑戦中の“ロボットくん”、いよいよプログラミングを本格的に始めた様子です。
まずはスタートしてマーカーを見つけに行くところ、
ロボットくんの作戦は、なるべく動きが止まる箇所を少なくして、スムーズな移動を心がけるとのこと。
そして、マーカーは1列目(手前)か2列目(奥)のどちらかに必ずあるので、どちらか一方だけあるかないか調べればいいようです。
次に、いよいよカメを捕獲に行きます。
ここの動きがなぜか(環境条件によって?)安定しないので、少しスピードを抑えて慎重に進むことにしました。
カメの捕獲の動きは前に作ってありますが、実際に回数を繰り返しやってみると、失敗することも多く、改造やプログラミングで微調整を繰り返していました。
持ち上げたカメを捕獲機に入れたら、それを運びます。
どうやってカメと捕獲機を一緒に運ぶのか、いろいろ考えたみたいですが、ロボットくんが選択したのは、捕獲機に入れたカメをつかんだ状態で、そのまま引いたり押したりして持って行く方法でした。
そしていよいよゴールのパート、
せっかくのここまでの成功が、ゴールがブレると水の泡になってしまいますので、一旦ライントレース(黒い線に沿って移動する)をして、体勢を整えた上で、ゴールを目指します!
という感じで、一応、全体の動きがうまくつながりました。
こうやってまとめて紹介するとすごくスムーズにできたようですが、何度も何度も失敗を重ね、その度に数字を調整したり、場合によっては作戦そのものを変えたり、あるいはロボットの形状を変えたり、成功確率を上げるための工夫をたくさんしています。
さあ、いよいよ次回は競技の様子をご紹介できるかと思います。
乞うご期待♪(つづく)