子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
1つ前の投稿では、スタンダード2コースの「火星開拓」ミッションの様子をご紹介しましたが、アドバンスト1コースでも「火星開拓」ミッションに取り組みました。
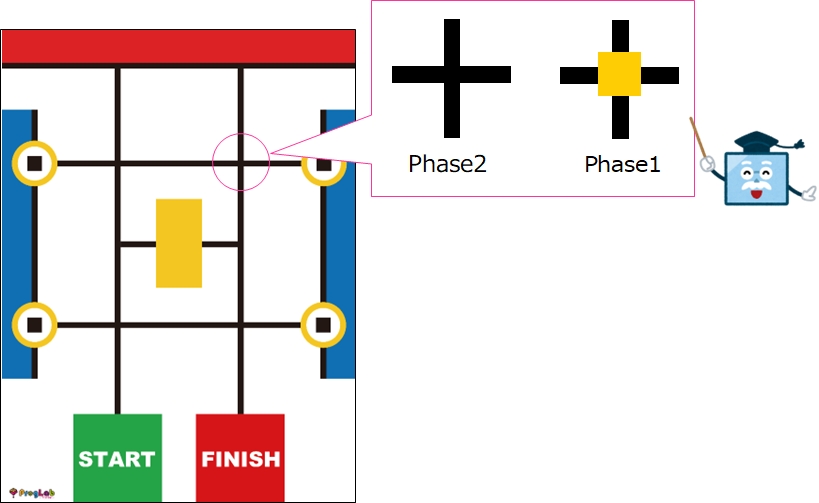
その名は「火星開拓 phase2」。
スタンダード2で取り組んだ「火星開拓 phase1」と、オブジェクト(ブロック)を運搬しつつゴールを目指すというミッションの内容は概ね一緒ですが、違いは黒いライン(道)の交差点に色のしるしが無いこと。黒いラインをトレースして移動するためのカラーセンサーの他に、直行するラインを探すためのンサーを追加する必要があります。
ただし、トレースするラインを、直行するラインと間違えて反応してしまったりするので、より正確な調整や制御が必要になってきます。
(端的に言うと、格段に難しくなります!)
で、成功するとこんな感じです。
さて、とある生徒さん、最終日のミッション競技会の直前になって、それまではかなり上手に動かせていたロボットが、急に今まで通りに動かなくなりました。
時間が迫ってきて、でも原因が分からず・・・結果的に競技を実施することができませんでした。(こんな時、むしろ先生の方が焦ります。)
本人は、飄々としていましたが、私自身気になったので、原因を探ってみました。
そして、原因を突き止めました!原因は意外と単純なことでした。
ところが、時すでに遅し、生徒は帰った後。。。
ということで、説明するタイミングを逸してしまったことから、検証動画にまとめてみました。
このブログは見ていないように思いますので、また今度教室へ来た際にでも動画を見せて説明しておきたいと思います。
そして、こういうことはよくあるので、今度同じようなことが起こった時に、自分でも原因究明ができるようになってくれるといいなと。