子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
スタンダード2コースでは、4~6月の3か月間で火星をテーマにした3つのミッションに挑戦してきました。
4月に取り組んだのが、ロボットで火星に向かうミッション、
5月には、火星に到着したロボットが探査を行うミッションに挑戦し、
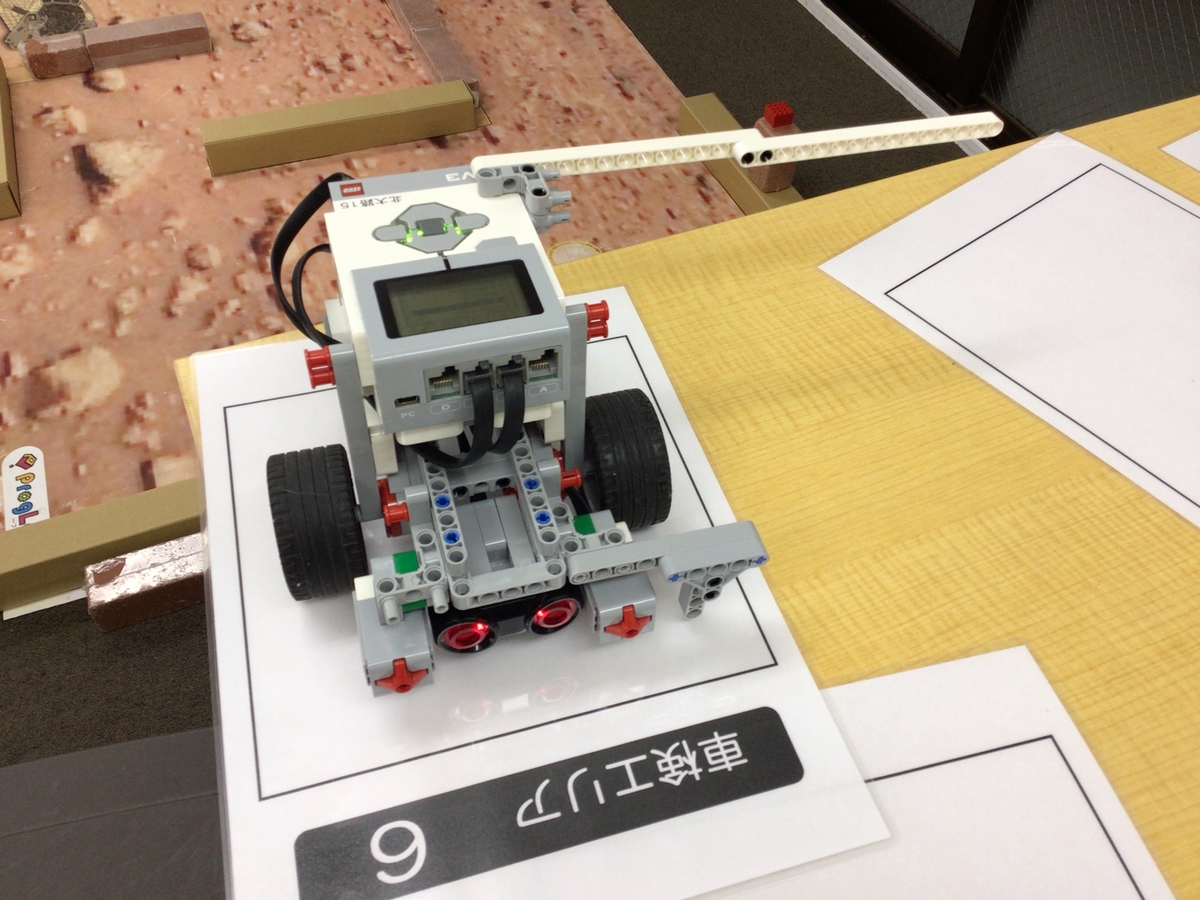
いよいよ6月は、火星に町を作るために火星ライナーという交通機関を通すミッションを行いました。
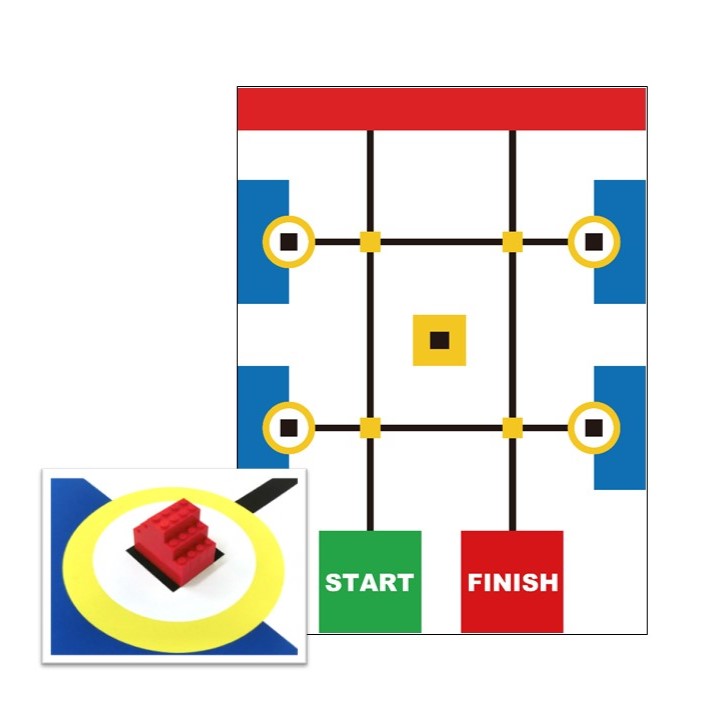
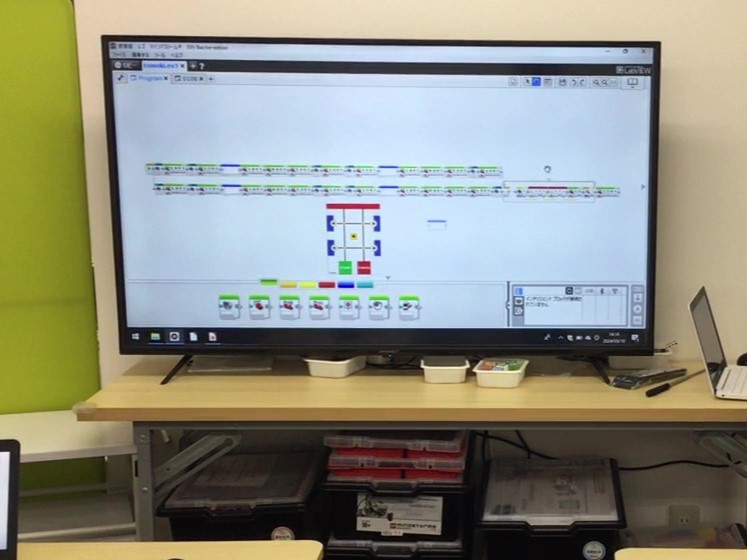
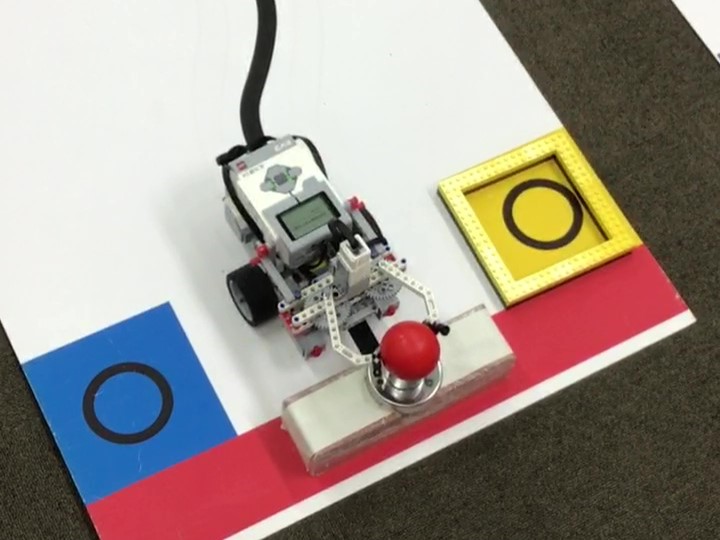
火星ライナーの仕組みは、白いコートに引かれた黒い線を、センサーでたどりながら前進するものです。途中の駅に整備士が待っていますので、火星ライナーで車庫まで連れて行ってあげましょう!
このミッションは、例年、成功者が多いのですが、センサーを上手く使うことで成功に近づくことを体感できます。
また、ブロック(の上の整備士)を運ぶために、どのような改造と動きをすればいいか各々考え、形にしていきました。
ということで、みんなのアイデアをご紹介したいと思います。
同じクラスだと、似ている改造が多くなりますが、そうやって別の人のアイデアを上手に取り入れるのも、決して悪いことでは無いと思います。
いやむしろ、多くの人が簡単に自分のアイデアや意見を投稿・発表できる今の時代、人がどうやっているのか研究することも、とても大切なのかもしれません。