子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
この度、「新町商店街」の魅力を発信されているインスタグラムで教室の様子をご紹介いただきました。
(プログラボ北大路は新町商店街の中に教室があります。)
この投稿をInstagramで見る
実際に、近くの大学の学生さんが何人か取材に来られて、写真を撮ったり、ロボットプログラミングを体験したりされました。
ご紹介いただき、ありがとうございます!
![]()
子ども向け ロボットプログラミング教室 プログラボ
子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
この度、「新町商店街」の魅力を発信されているインスタグラムで教室の様子をご紹介いただきました。
(プログラボ北大路は新町商店街の中に教室があります。)
この投稿をInstagramで見る
実際に、近くの大学の学生さんが何人か取材に来られて、写真を撮ったり、ロボットプログラミングを体験したりされました。
ご紹介いただき、ありがとうございます!
子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
スタンダード2コースでは、4~6月の3か月間で火星をテーマにした3つのミッションに挑戦してきました。
4月に取り組んだのが、ロボットで火星に向かうミッション、
5月には、火星に到着したロボットが探査を行うミッションに挑戦し、
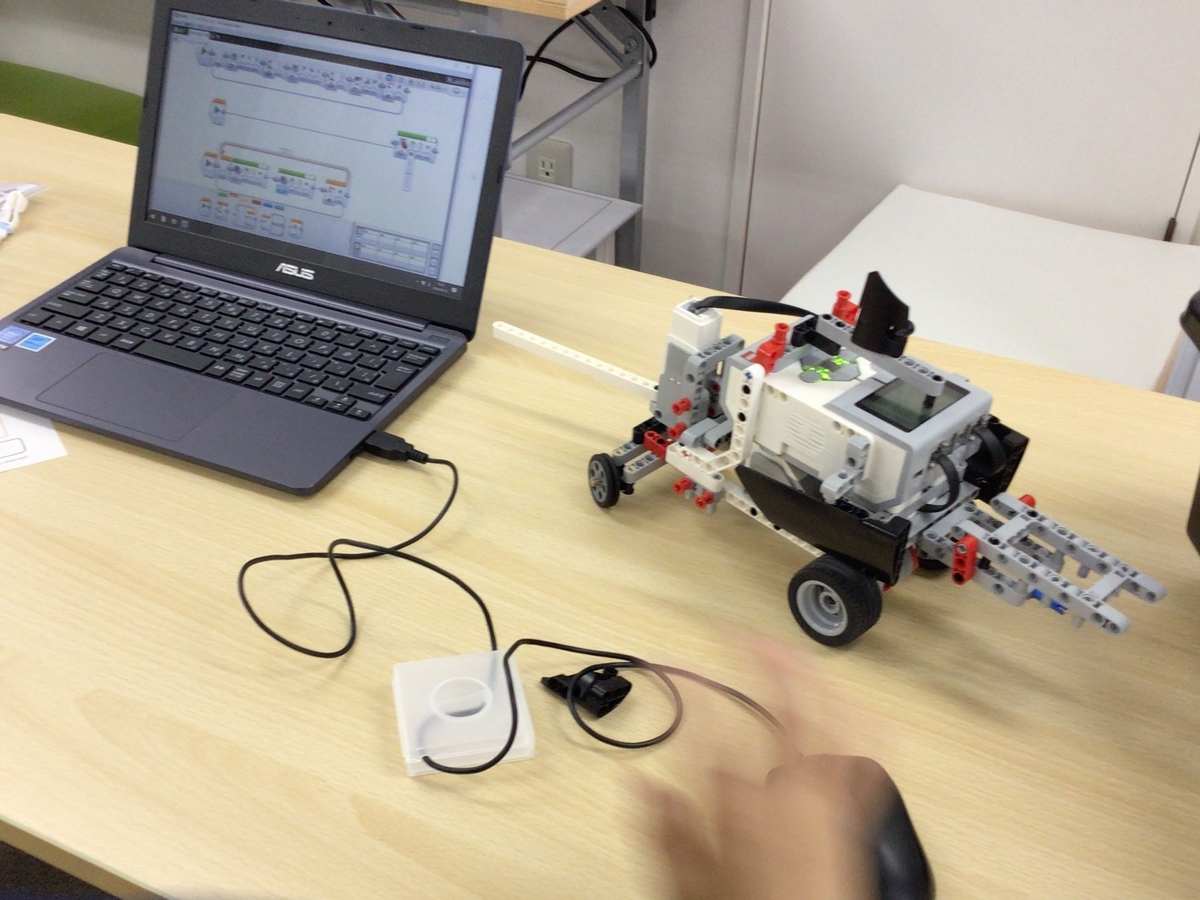
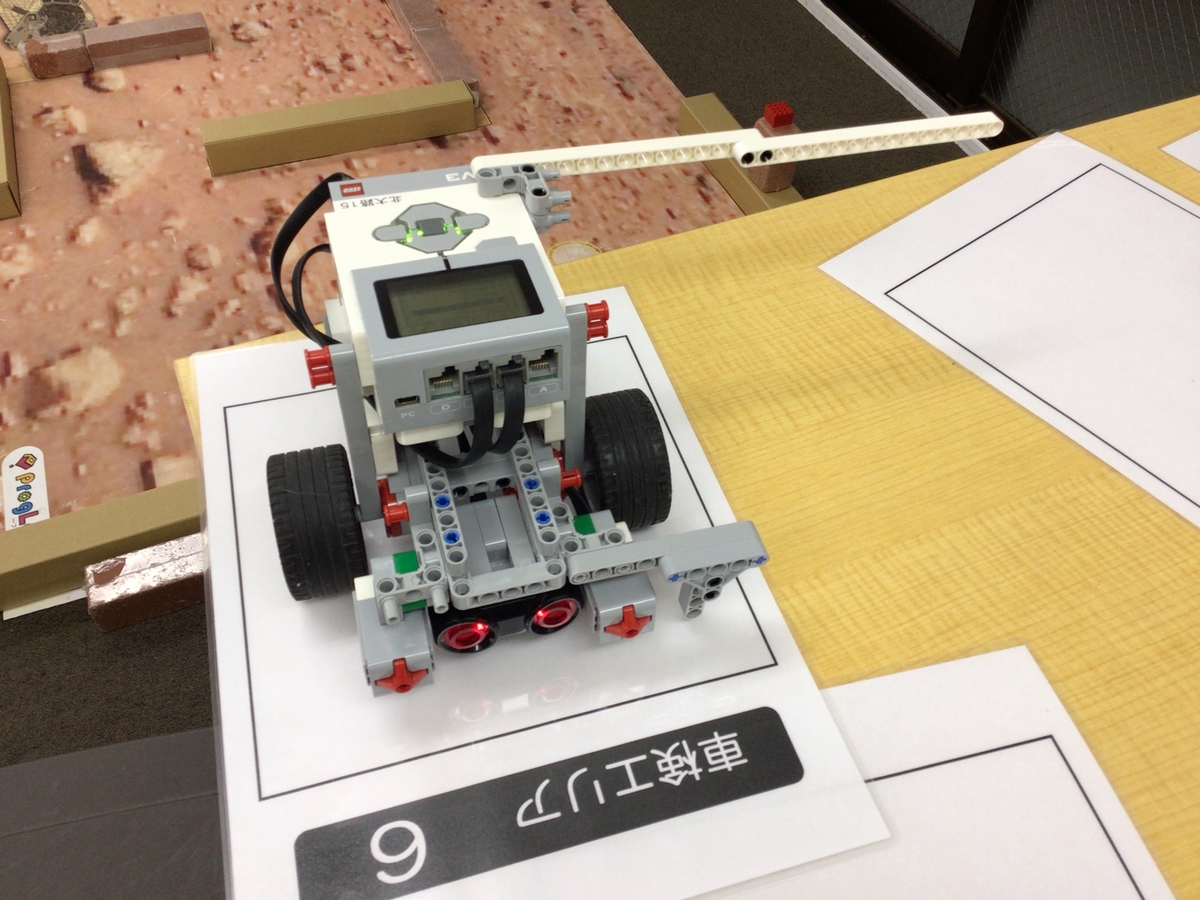
いよいよ6月は、火星に町を作るために火星ライナーという交通機関を通すミッションを行いました。
火星ライナーの仕組みは、白いコートに引かれた黒い線を、センサーでたどりながら前進するものです。途中の駅に整備士が待っていますので、火星ライナーで車庫まで連れて行ってあげましょう!
このミッションは、例年、成功者が多いのですが、センサーを上手く使うことで成功に近づくことを体感できます。
また、ブロック(の上の整備士)を運ぶために、どのような改造と動きをすればいいか各々考え、形にしていきました。
ということで、みんなのアイデアをご紹介したいと思います。
同じクラスだと、似ている改造が多くなりますが、そうやって別の人のアイデアを上手に取り入れるのも、決して悪いことでは無いと思います。
いやむしろ、多くの人が簡単に自分のアイデアや意見を投稿・発表できる今の時代、人がどうやっているのか研究することも、とても大切なのかもしれません。
子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
スタンダード1クラスでは、『シングルモーターカー』を前回のブログでご紹介しましたが、このクルマが今月はステアリング付きの曲がれるクルマに進化しました。
ステアリングは、実際の自動車にも付いているスムーズに曲がれる仕組みで、これとモーターの動きの組み合わせで、ハンドル操作をするようなイメージで、ゆらゆらと左右に曲がって進めます。
右に行ったり、左に行ったり順序通りに処理するプログラムをした翌週は、「ループ(繰り返し)」のプログラムで小刻みなジグザグ走行を行いました。
「繰り返し処理」は基本となるプログラムの1つで、上手に使うことで省力化が可能になります。
(実際、「右→左→右→左→右→左→右→左→右→左」とするより、「(右→左)×5」の方が簡単ですよね!)
繰り返しの動きが、何かの動物みたいに見えたりして、バラエティあふれる改造がたくさん見られました。
子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
スタンダード1クラスでは、『シングルモーターカー』つまり、モーターが1つで前後に動けるクルマを作ってプログラミングしました。
モーター1つのクルマはビギナークラスでも作りますが、少しだけ複雑な形をしています。―――その謎は、翌月に判明することになりますが―――スタンダード1ではこのクルマを使って、各駅停車の電車(かバス)のプログラムに挑戦しました。
駅(バス停)にピッタリ停まって、また次の駅まで出発します!
行ったり来たりするのに、数字だけではなく「-」(マイナス)や、時には「.」(小数点)を入力しました。そして最後の週には、駅名表示というイメージでアルファベットも少し入力してみました。
子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
スタンダード2コースでは、4月に取り組んだロボットで火星に向かうミッションをブログでご紹介しましたが、5月の3回の授業では、火星に到着したロボットが探査を行うミッションに挑戦しました。
火星の表面には障害物となる岩などがたくさんあり、これを上手くすり抜けて、目的地に到着したら石を採取するのが今回のミッションのテーマです。
岩のゾーンでは、ただロボットの移動をするだけでなく、岩をセンサーで感知しながら進むことで、狭い隙間を通り抜けやすくします。
そこで、超音波センサー(障害物の有無や距離を感知)、タッチセンサー(障害物に当たったかどうかを感知)を使ったプログラムを学び、実践しました。
また、調査対象の石を採取するのにも、アームのような装置が必要で、各自がどんな形状がいいか考え、ロボットを改造しました。
前回の4月のミッションは完全制覇達成者はいませんでしたが、今回は3名の達成者が出ました!
ただ、プログラムは変えていないのに、どうしても練習・本番と毎回同じ動きをしないことに納得できない子がたくさんいます。
ピッタリ同じところに置くことはできず、床だって完ぺきに平坦ではないですし、センサーの反応も、ある意味「だいたい」でしかないので、そのズレが積み重なって、大きく動きが変わるのは、リアルなロボットを動かしている限り、仕方が無いことなのですが・・・
逆に言うと、そのズレをどうやって小さくするか、あるいは、多少ズレても成功させるためにはどうすればいいか、アイデアを出して実現するところに、【ロボットプログラミング】の難しさと醍醐味があるのではないかと思います。