子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
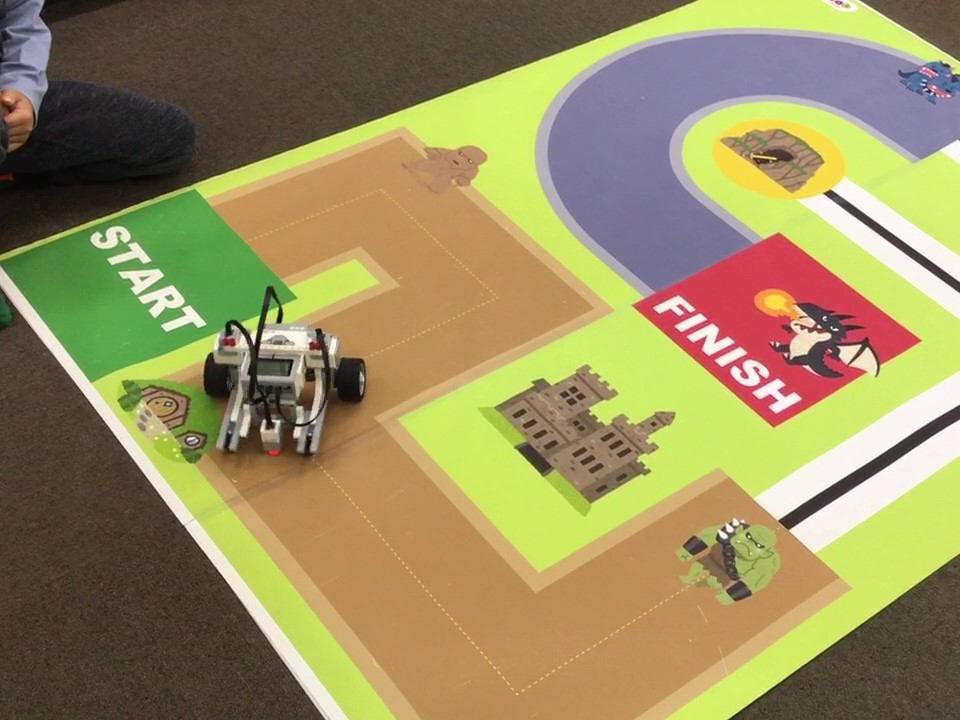
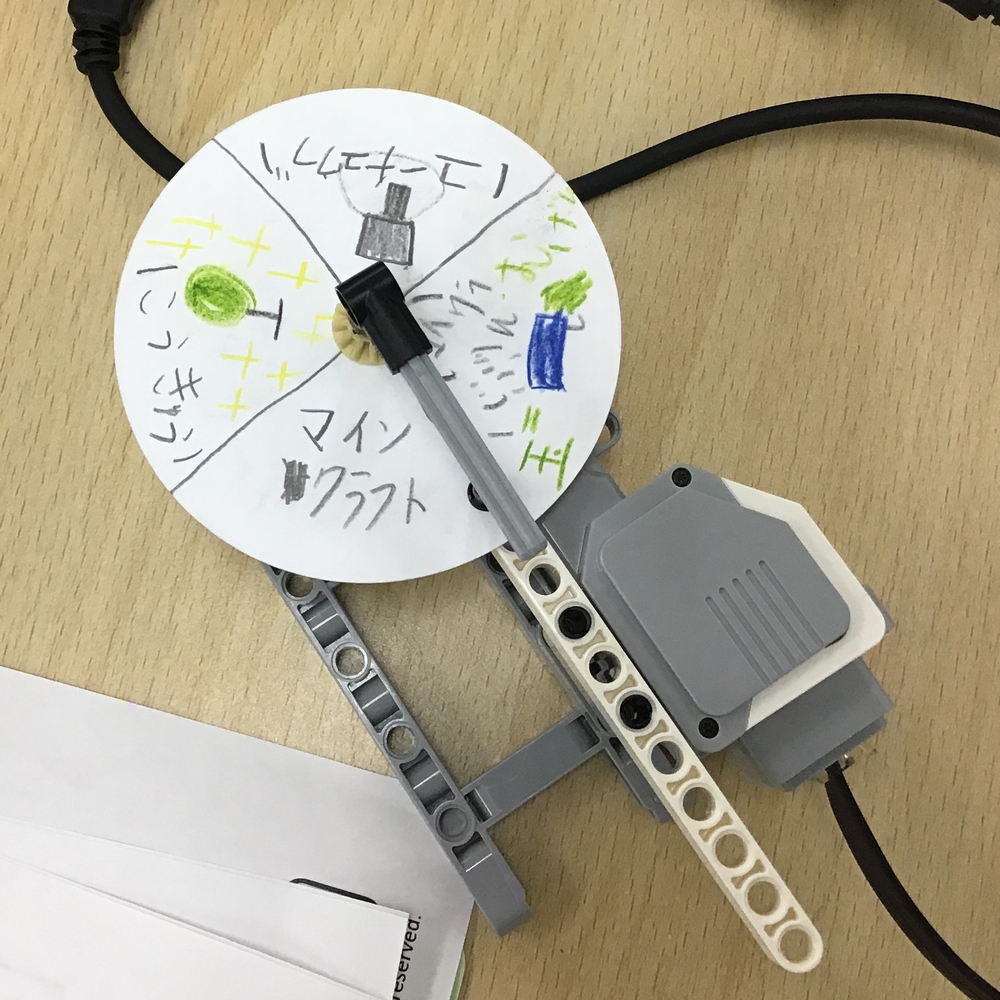
スタンダード1クラスでは、『地震装置』という地震の実験装置のようなものを作ってプログラミングしました。
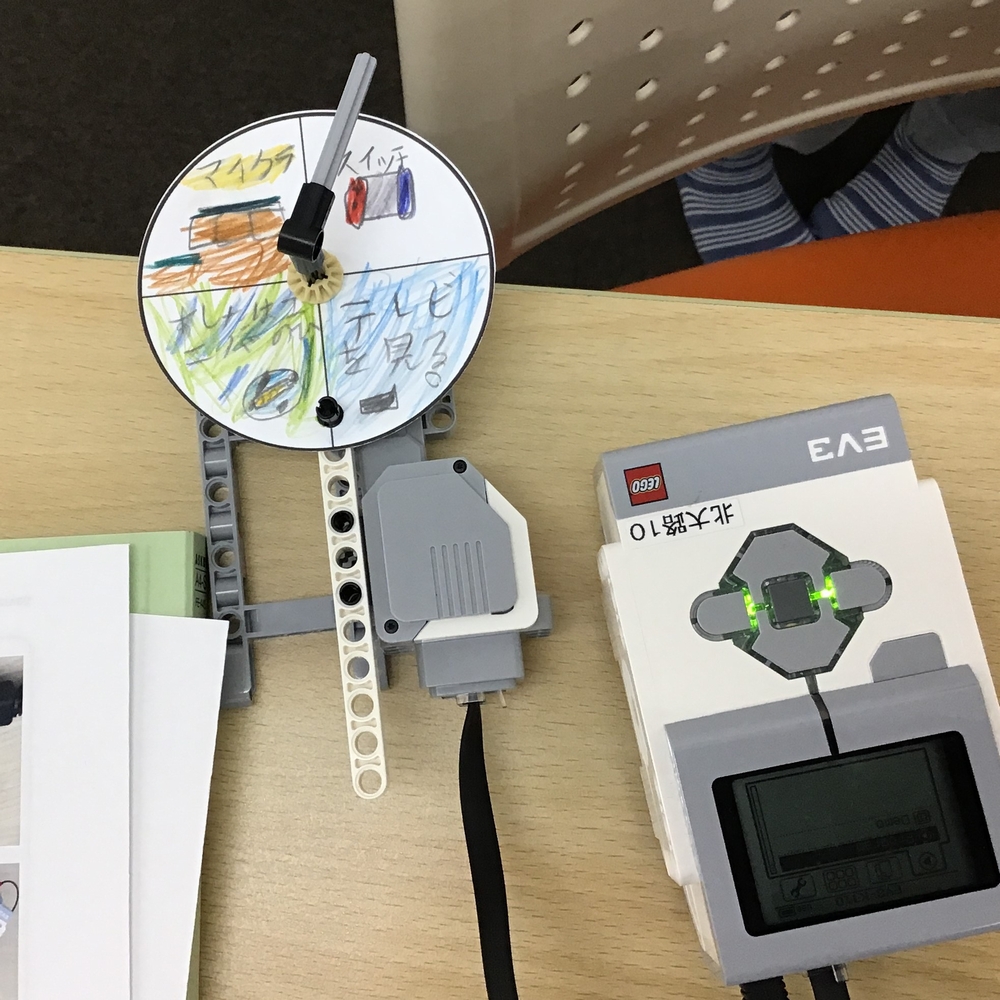
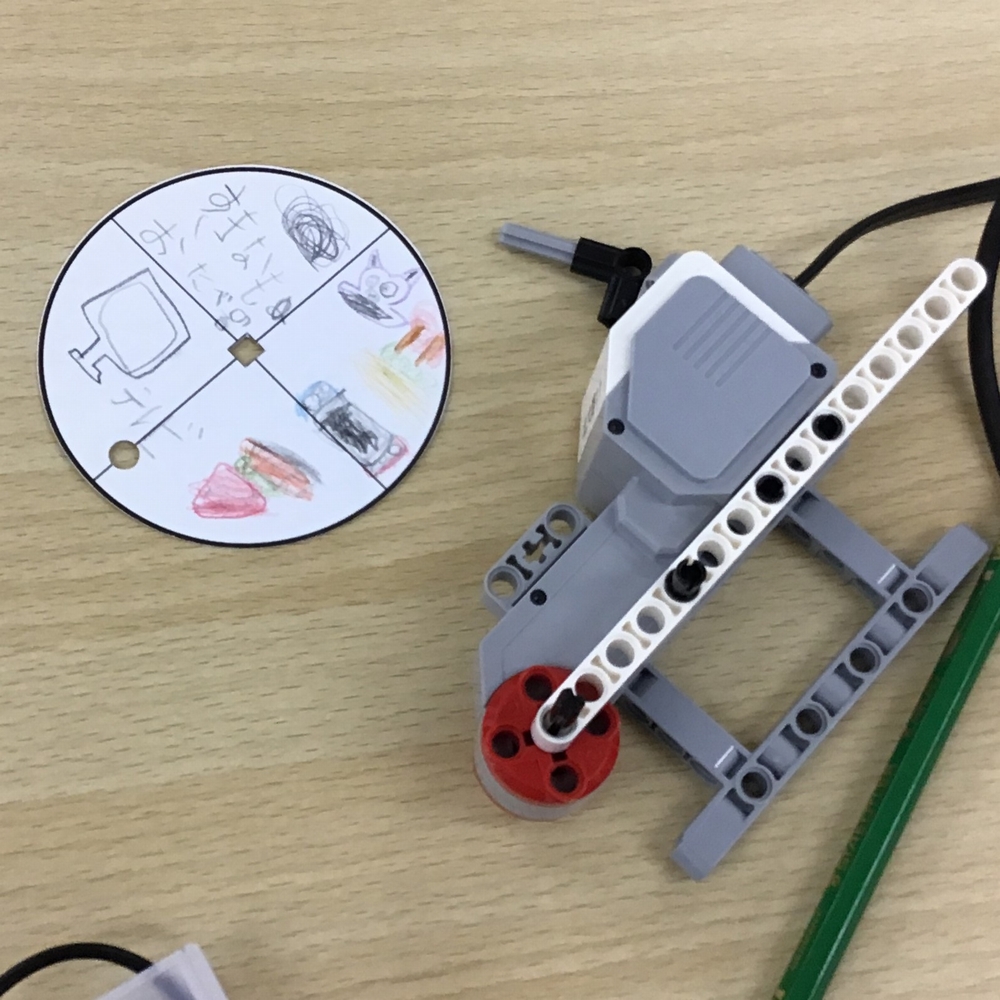
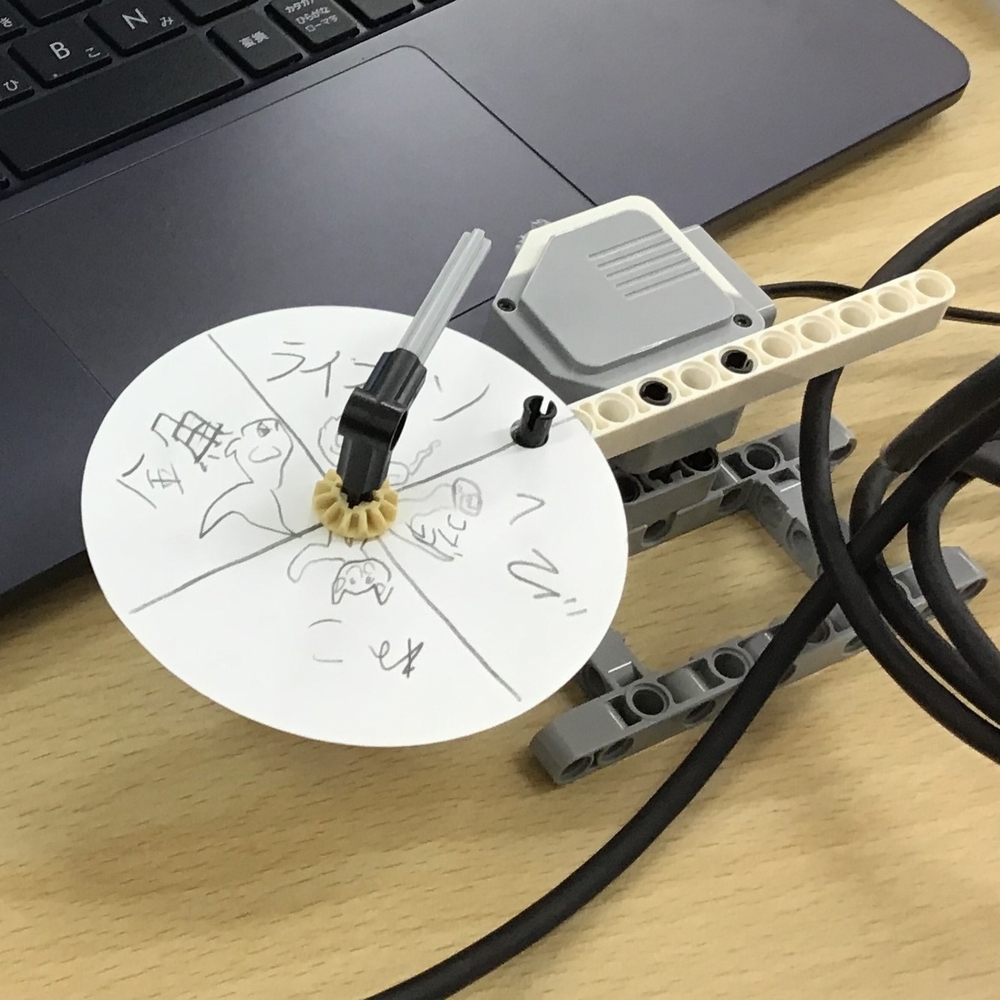
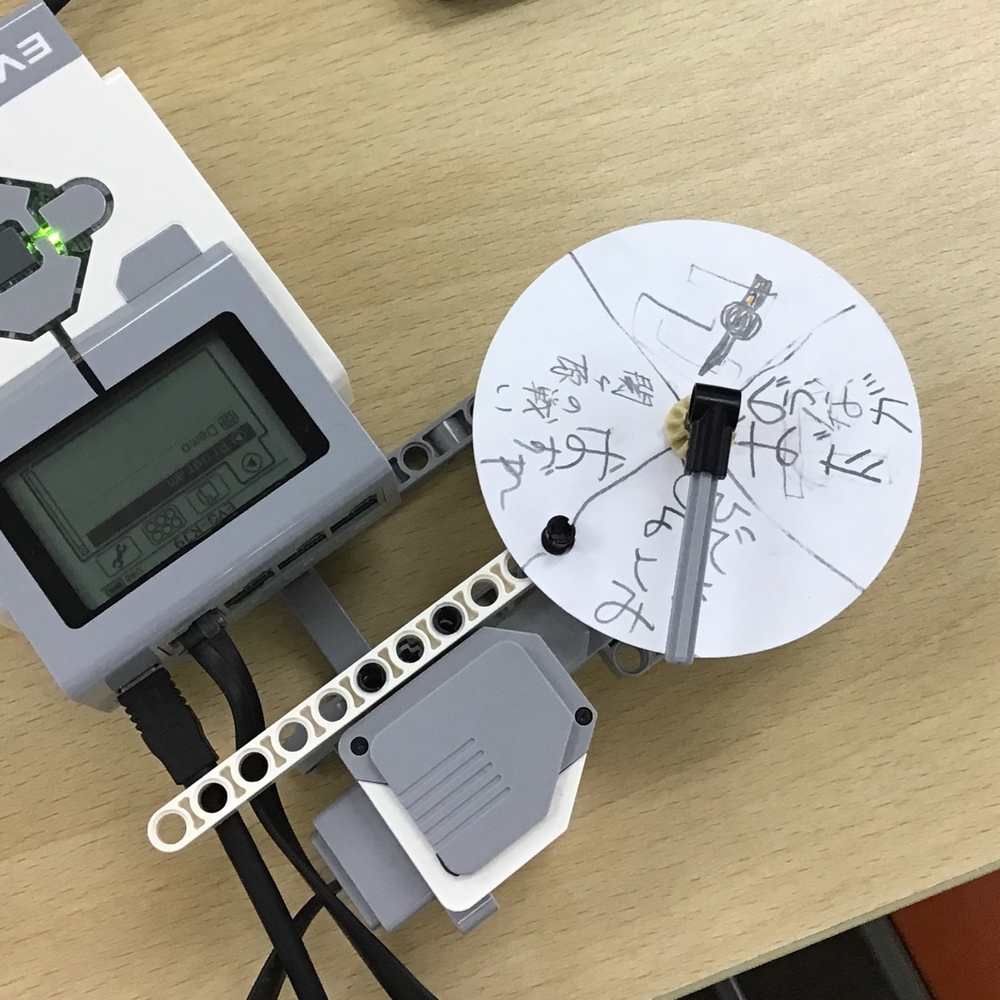
地震装置はプログラムでモーターを動かすと、お皿がゆらゆら揺れるロボットで、お皿の上にはブロックで作った建物を載せて揺らします。
パワー(スピード)や建物の高さなどによって、倒れてしまったり、倒れず持ちこたえたり・・・数字をいろいろ変えて何度も実験しました。
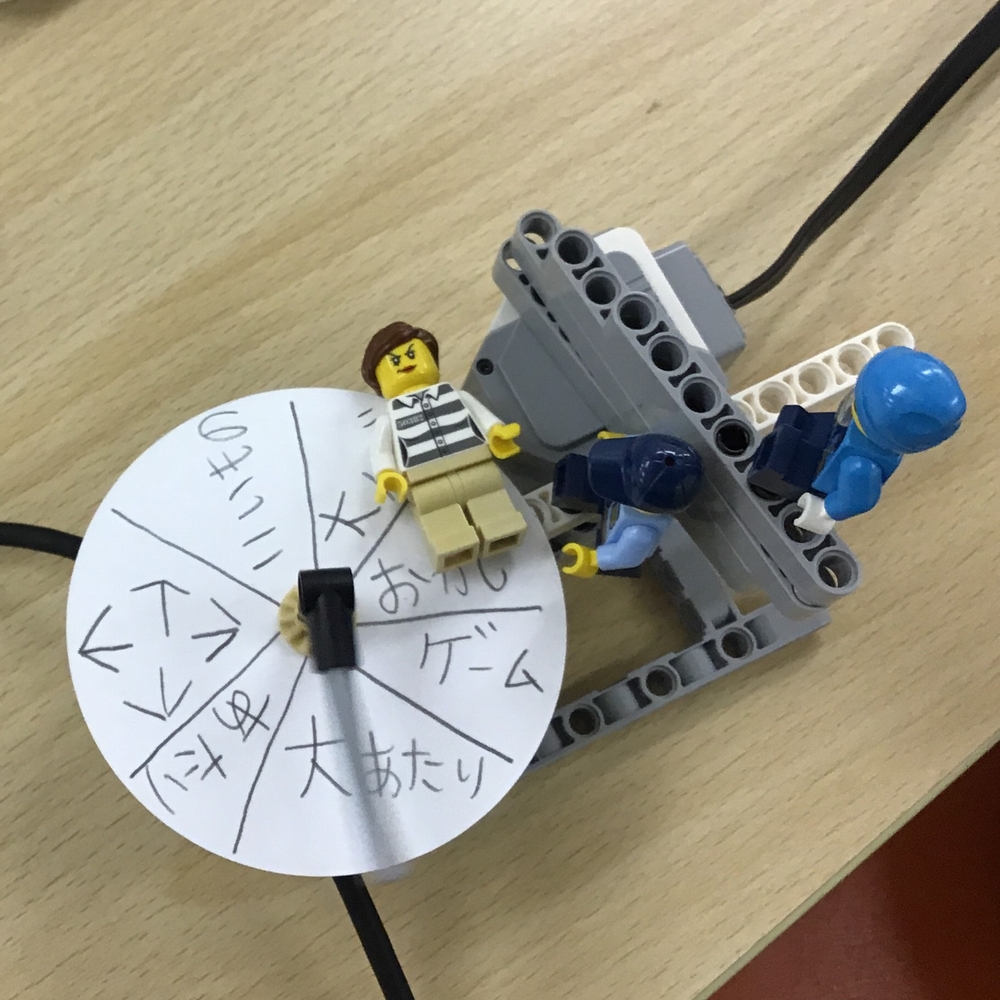
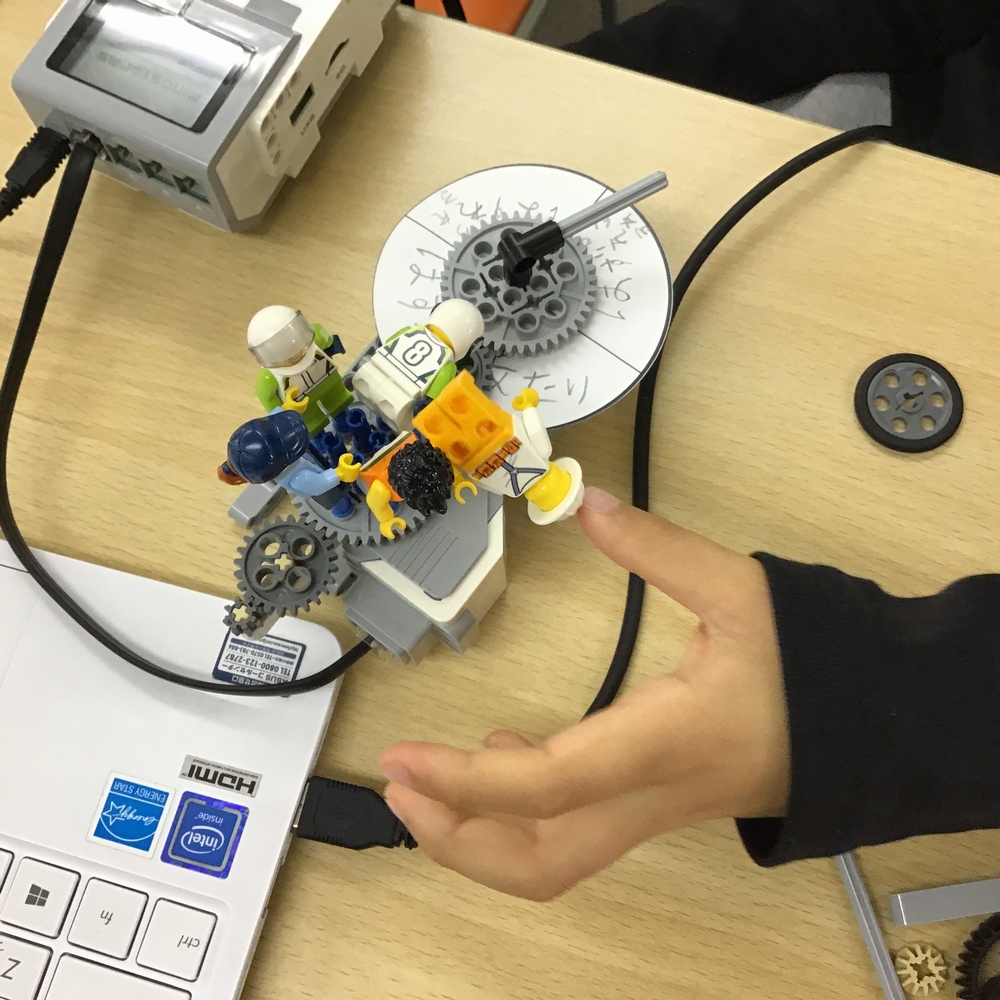
超高層タワマンでもパワーが小さければ倒れませんし、逆に5階建てくらい(のイメージ)のビルでも、パワー全開にするとあっさり倒れてしまいました。
また、倒れないように安全装置(=支え)をしてみたり、といった工夫も見られました。
話は少し変わるのですが・・・昨年度このクラス(スタンダード1)を受講した生徒が、最近こんな話をしてくれました。
「友達は家でネコを飼ってるんだけど、ネコが扉を開けて出て行った後、扉を自動で閉めてくれるロボットは作れるのかって聞かれた・・・センサーを使えばできそうかなと思うんだけど・・・」
たしかにセンサーを使ってネコの出入りを感知すればできそうです。
こんなふうに、“ロボットやプログラミングでこんなことができそう”と、想像することができれば、目的の半分はもう達成できているのかなと思います。