子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
スタンダード1クラス、7月は「歯車」について学びました。
歯車には
・回転(動き)を別の場所に伝える
・歯車の組み合わせで回転の速度を変える
・回転の向きを変える
などの働きがあります。
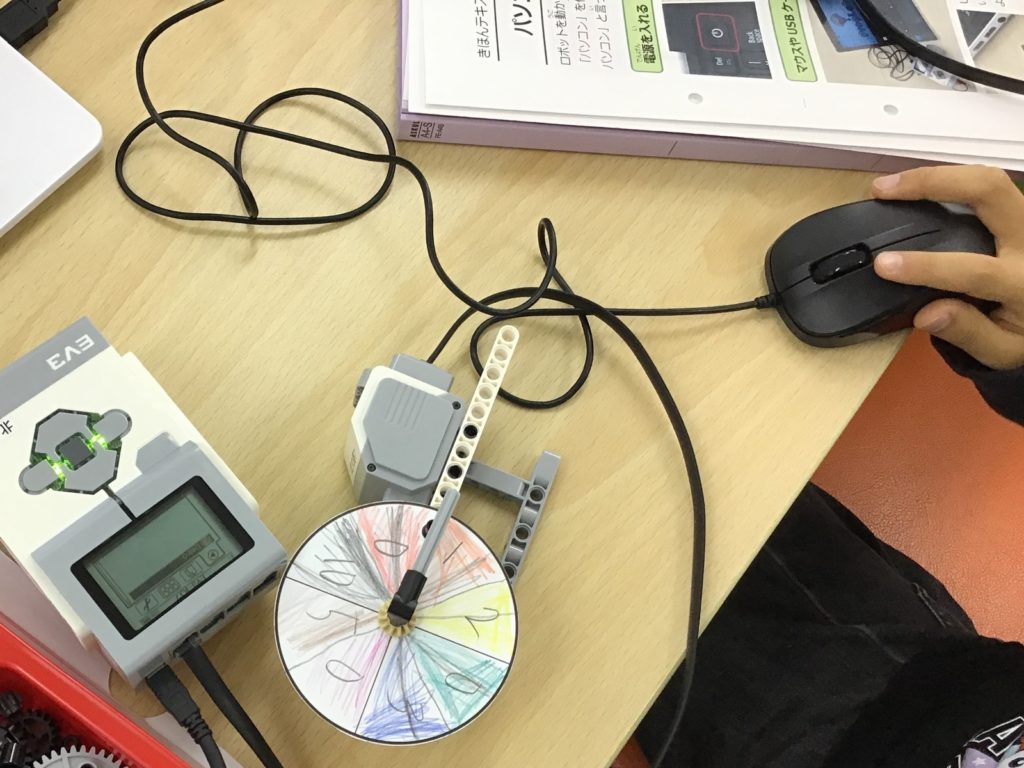
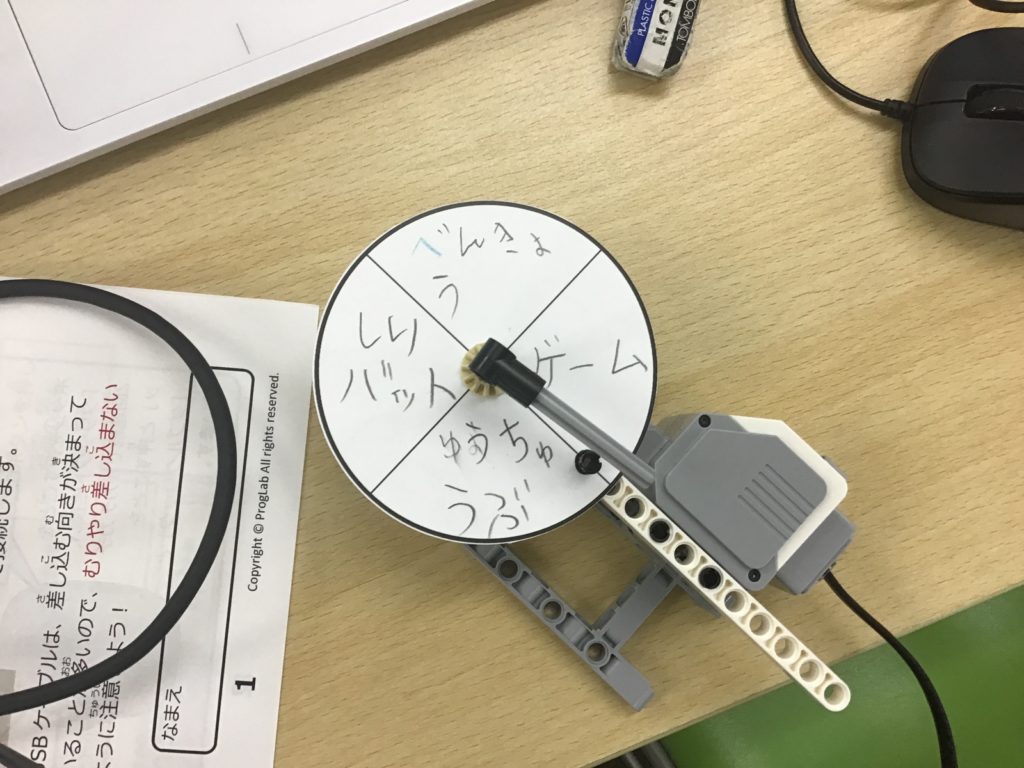
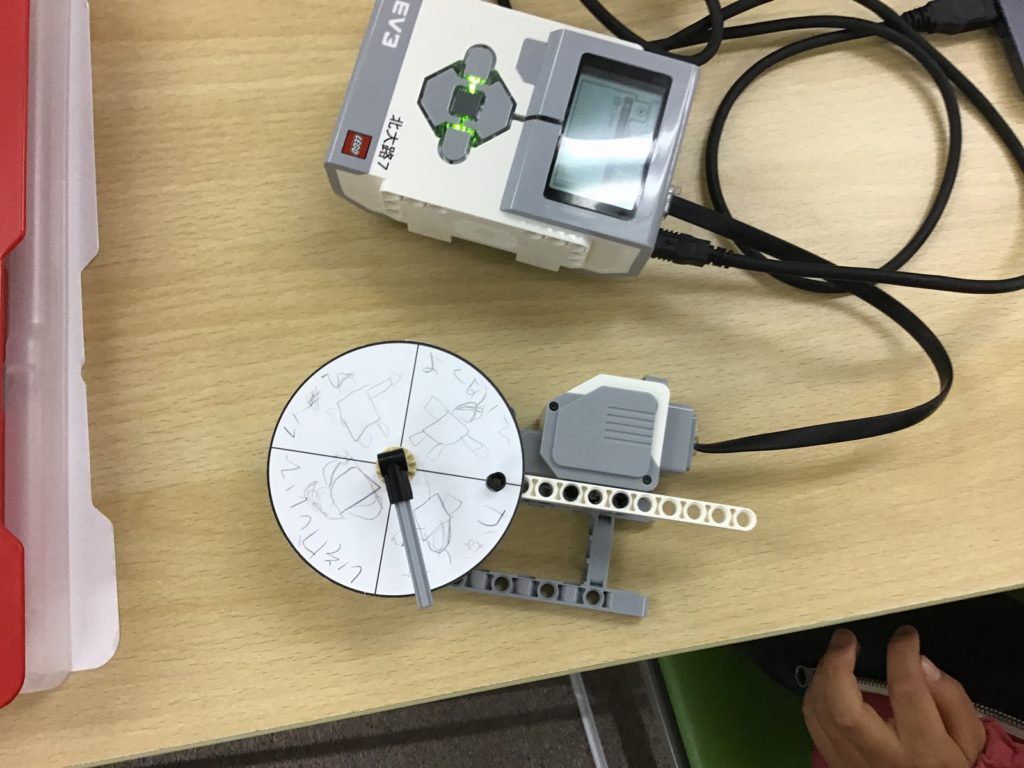
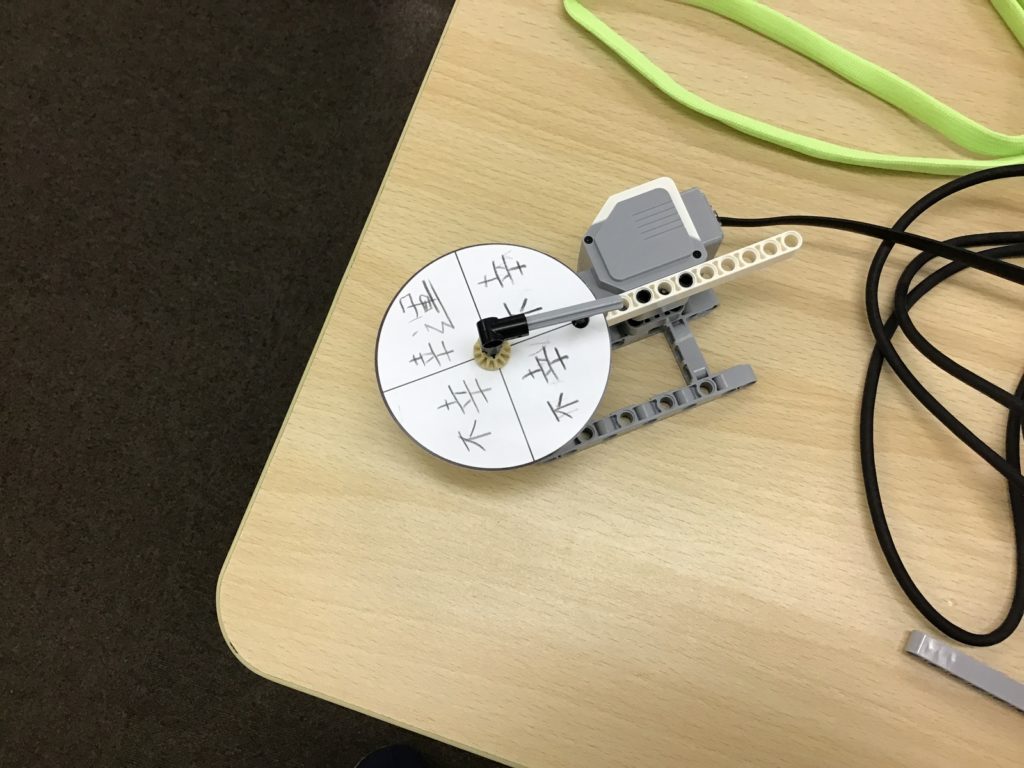
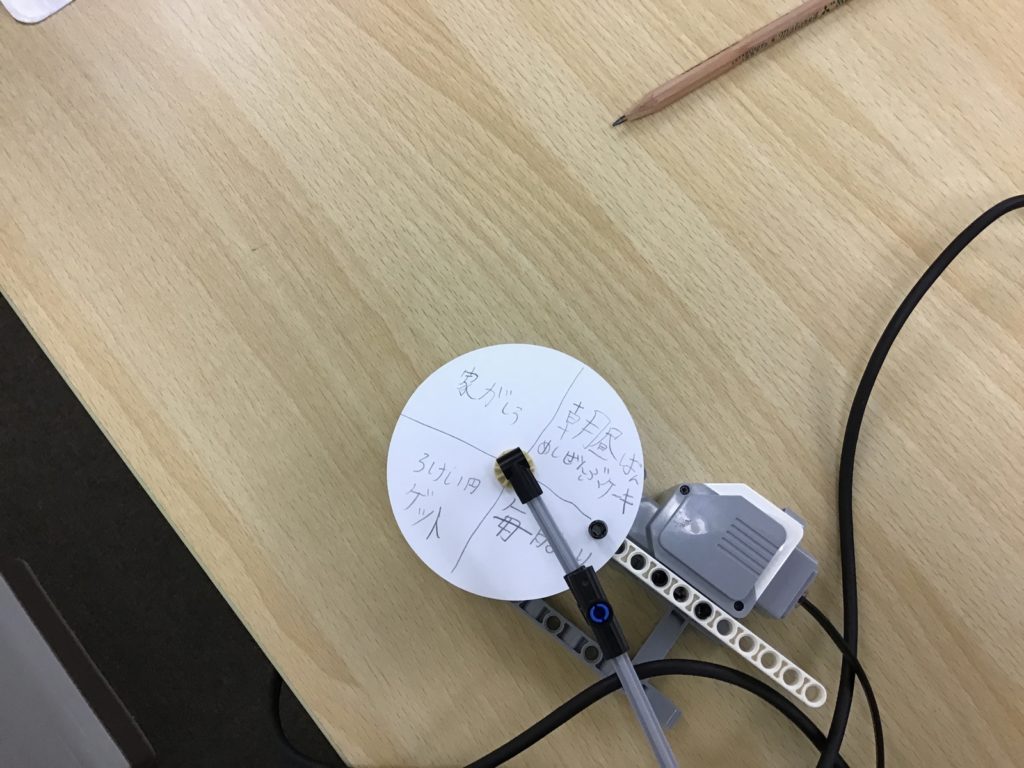
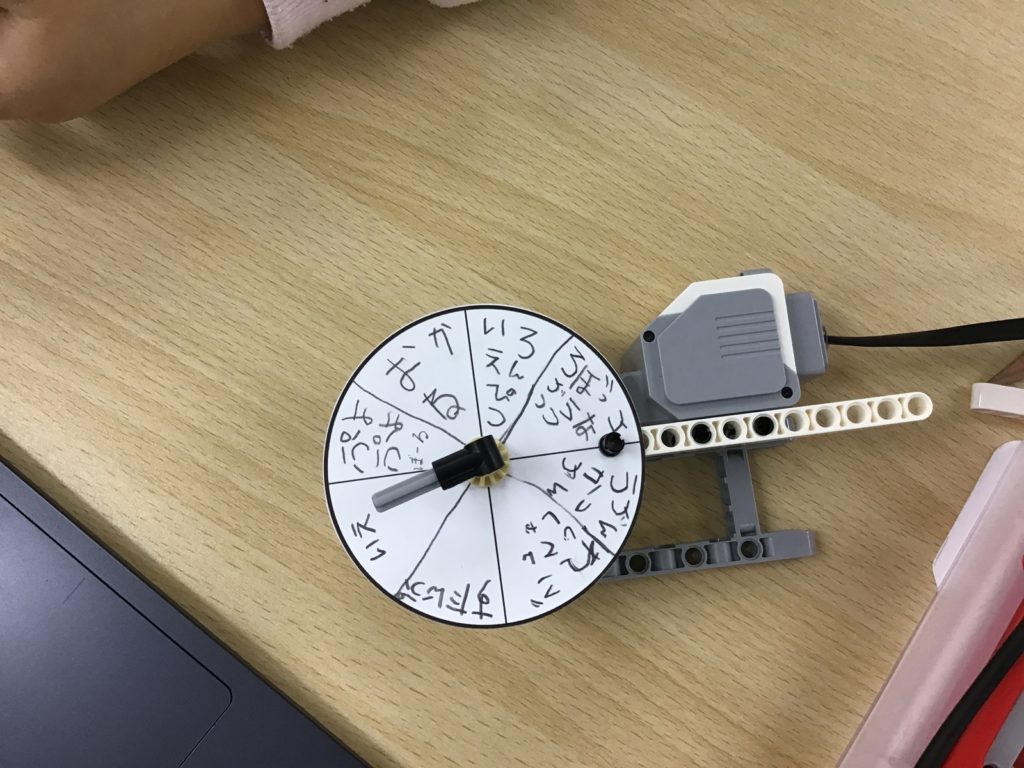
今回は、歯車の組み合わせで回転速度がアップするような装置を作り、これを用いたロボットでコマを回しをしました。

良く回るコマ、きれいな模様のコマ・・・コマもオリジナルで開発し、最後に「コマ回し大会!」で対決します。
コマ回しは人気のカリキュラムの一つですが、この授業の後、ちょっと手持無沙汰になると、みんなコマを作って、回して遊ぶようになってしまいます。。。
(それだけ楽しかった、という意味でしょうか?)