
子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
ビギナークラス、10月のテーマは「リンク機構」で、前回の投稿ではぱたぱたバードというロボットを作った時の様子を紹介しました。
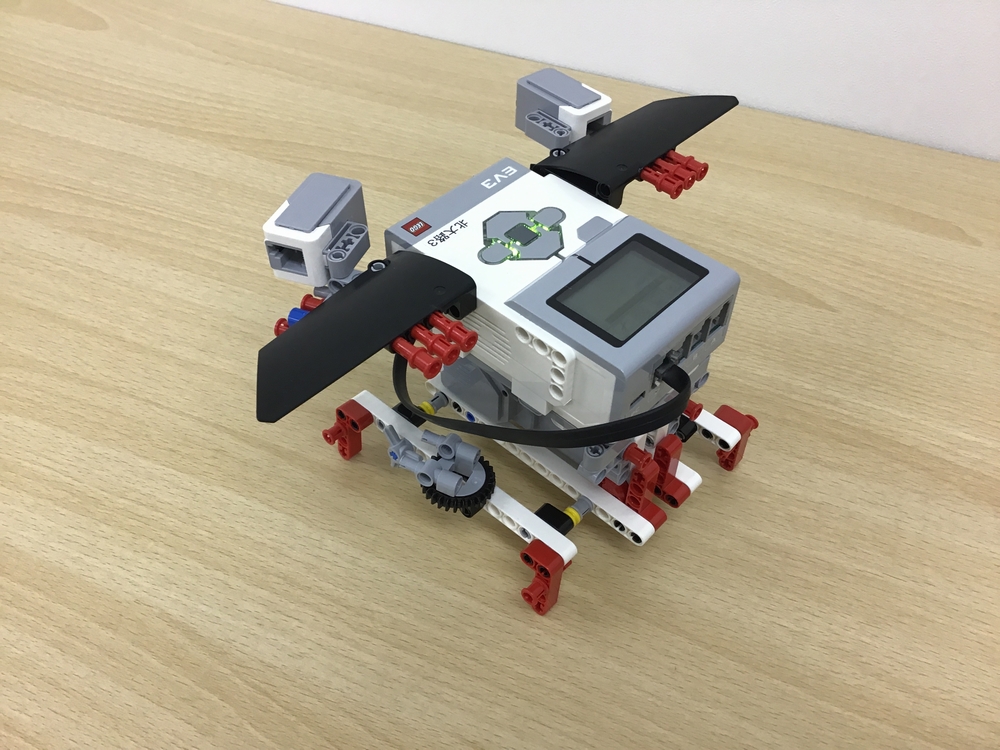
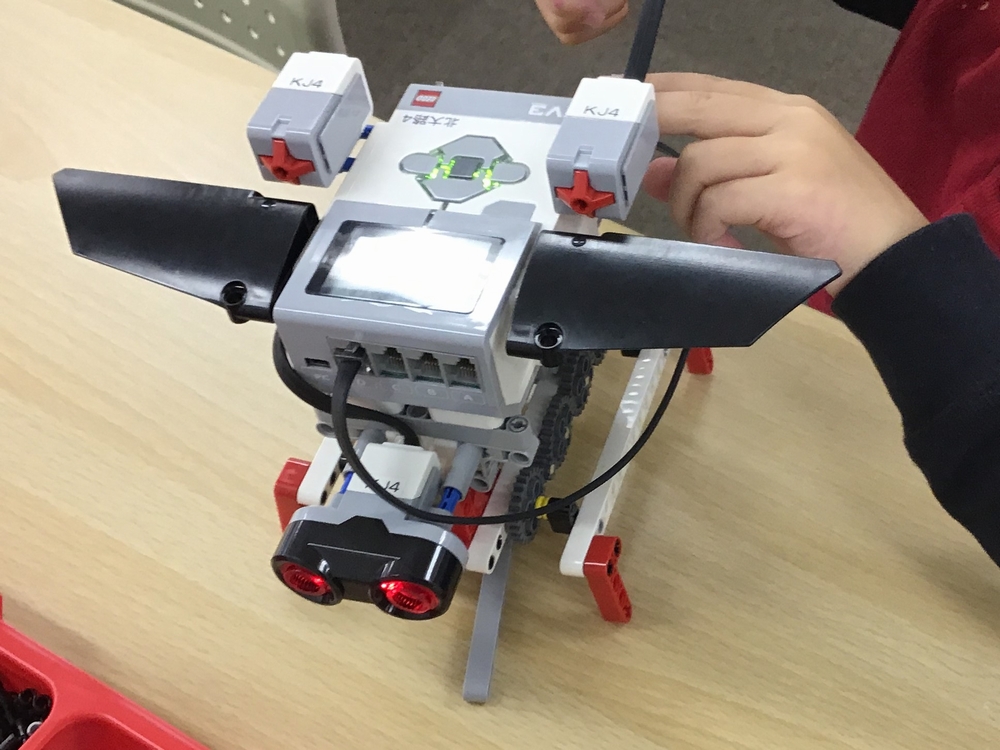
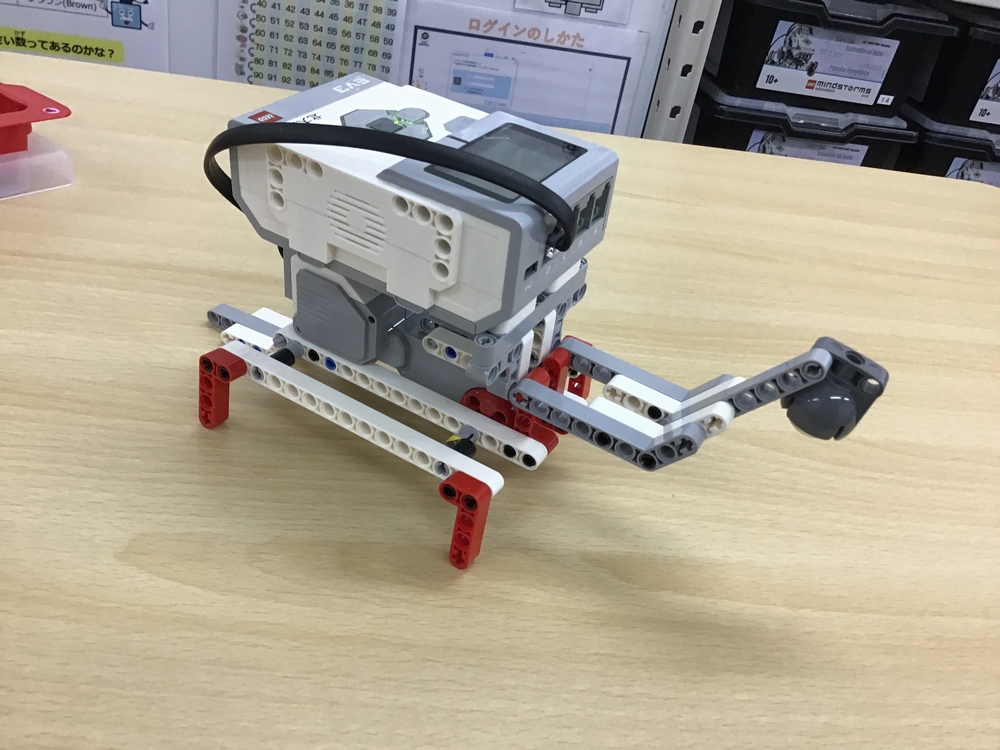
リンク機構には様々なパターンがあり、とても奥が深いのですが、ビギナークラスではぱたぱたバードの他に2週目に「ふりふりキリン」という首を前後に揺らすロボットを、そして3週目には「のしのしタートル」というリンク機構の仕組みでゆっくり歩くロボットを作りました。
それぞれ改造したオリジナル作品をいくつか紹介します。

4月からスタートしたビギナークラス、みんな組み立てにも慣れてきて、途中であきらめるようなことも少なくなってきました。
とはいえ、今回の「のしのしタートル」は、かなり組み立ての工程数が多く、難しいところもあったりして、大幅な改造までなかなか手が回らない子もいました。
改造は羽を付けたり、ボタンのセンサーを付けたりする子が多かったのですが、実は次回はこのボタンのセンサー「タッチセンサー」のプログラムを初めて行います。
そのことを活動の最後に伝えると、みんなとても楽しみにしているような様子でした。