子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
スタンダード2コースも今年度のクラスが始まりました。
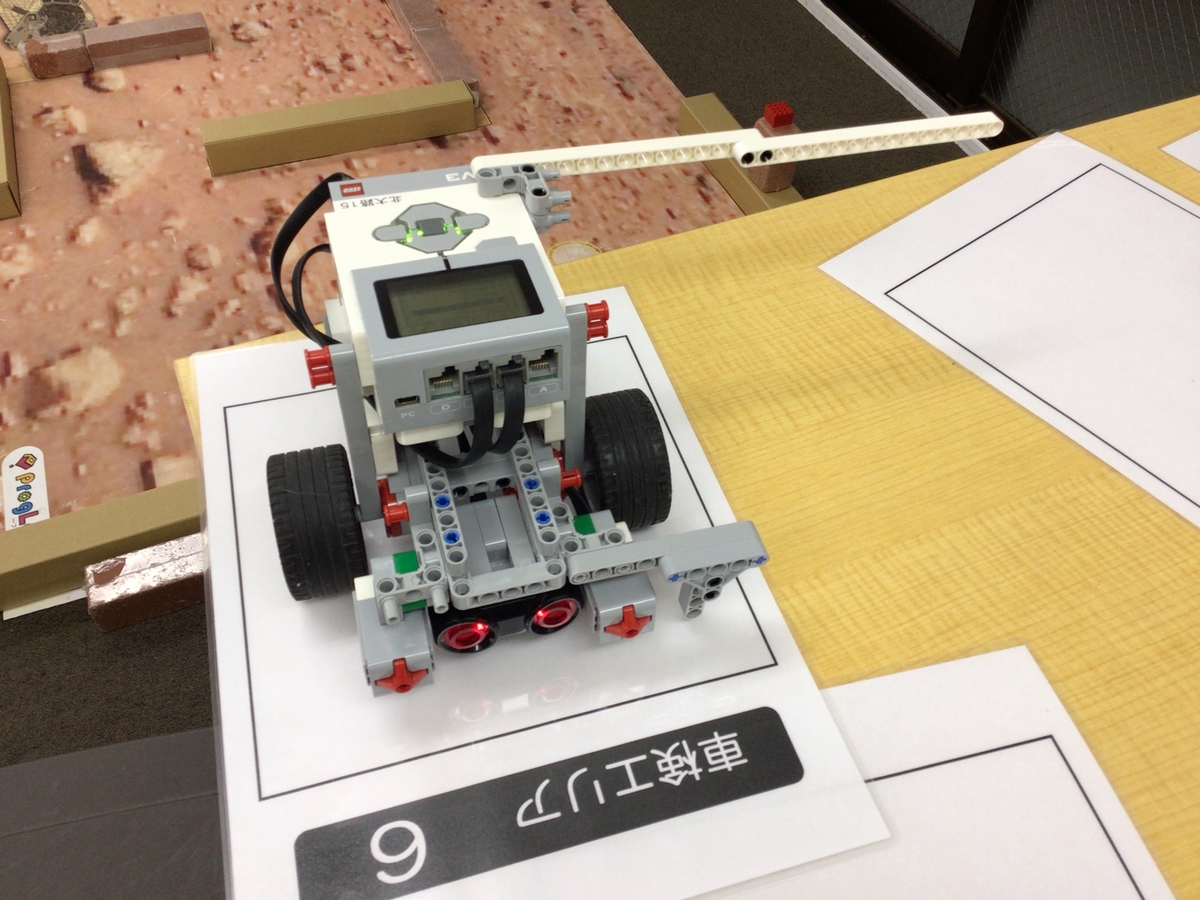
スタンダード2の1年間を通したテーマが「火星」、まずは4月の3回の授業で地球から火星へのロボットの旅(というプログラミング)に挑戦しました。

プログラミングとしては、この時点ではまだできることは少なく、まずはタイヤの付いたロボットの移動ルートを決めて、前に進ませる、左右に曲がる、バックする、といった基本的な動作を順番につなげていきます。
できることが少ないだけだけに、練習中に失敗することも多く、「運」の要素もあって、たくさんの失敗から何度も調整する作業が必要です。
こういうことが得意なタイプもいれば、失敗に熱くなってしまうタイプ、あきらめてしまうタイプ、それぞれです。
さて、いよいよ本番です。
火星に到着するだけでなく、火星に置かれた石(ブロック)を動かせたら点数アップ!地球に帰還できたら点数アップ!
みんなの名誉のためにも、今回は失敗は少なめにして、ミッション本番で比較的うまくいった何人かの様子を、緊張感と共にご紹介します。
残念ながら、ミッションコンプリート、つまり火星に到着して石を持って地球に帰還できた人はいませんでしたが、逆に、火星に到着できなかった人もいませんでした。
みんな頑張ったと思います。
そして、もう一つのチャレンジ、競技終了後にミッションの内容や感想を発表する【プレゼンテーション】をしました。みんな、プレゼンテーションという言葉自体も初めて聞くようです。
今回は最初なので、みんなの前で何かひと言でも話せればOKで、これから徐々に話す内容が多くなってきたり、自分で文章を考えたり、プレゼン資料を作成したり・・・と1年間をかけてレベルアップしていきます。
参考:スタンダード2の最後のミッションの様子

→プログラボの詳細と無料体験会のお申し込みはこちらから