子供向けロボットプログラミング教室プログラボのブログ担当です。
今週のスタンダード2のクラスは、ロボット制作もプログラムもしない授業です。
では、何をするかというと、「プレゼンテーションソフトの使い方を学ぶ」です。
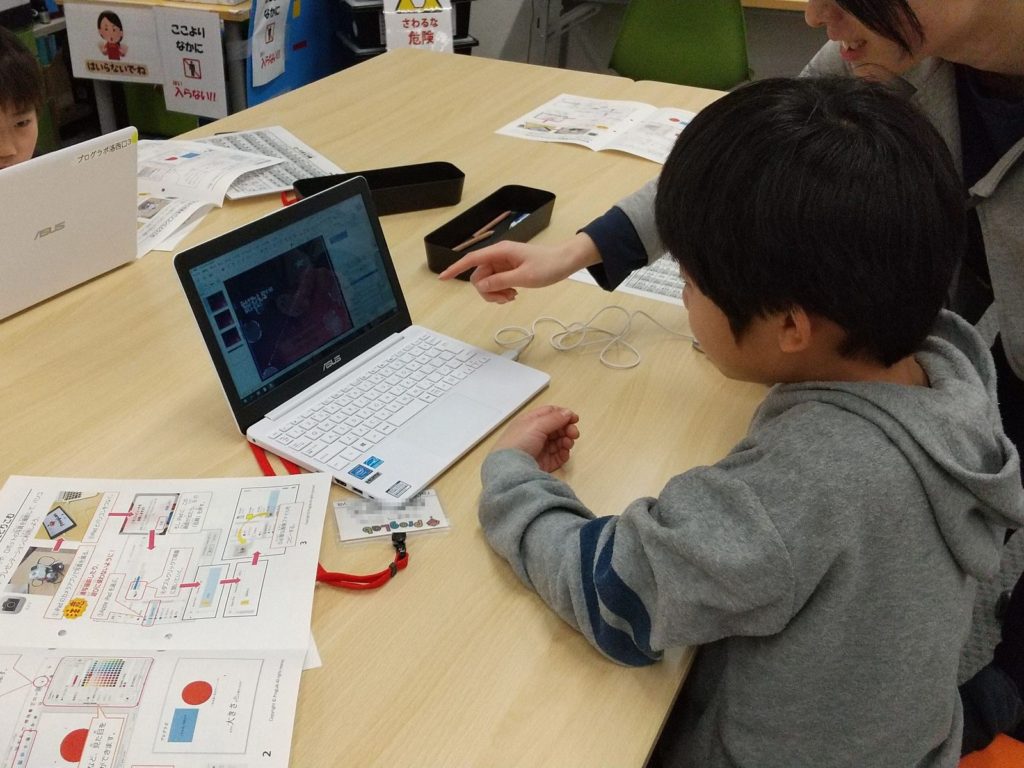
普段、パソコンでプログラミングをしているとはいえ、ビジュアルプログラミングなので、文字を打つ機会はそんなに頻繁にはありません。
書きたい文章があっても、ローマ字をさがして打つのに苦労しながら、それでも、少しずつ作っていきました。
文章だけでなく、発表の内容やイラストなども考えて、、、資料ができたらいよいよ発表です!
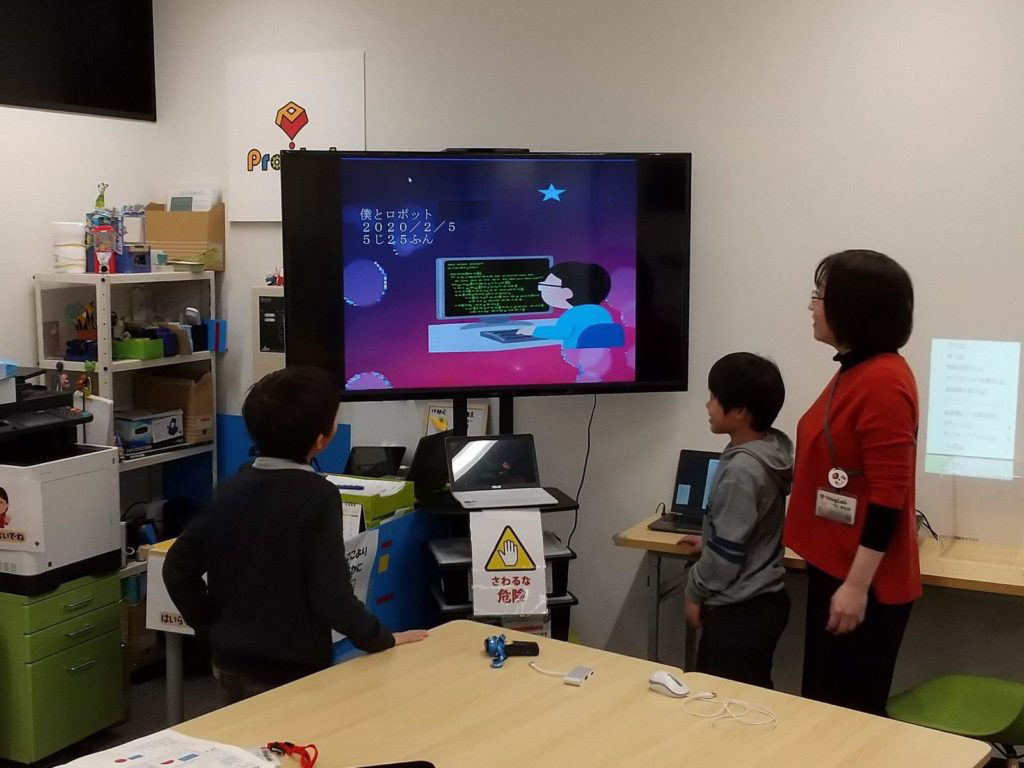
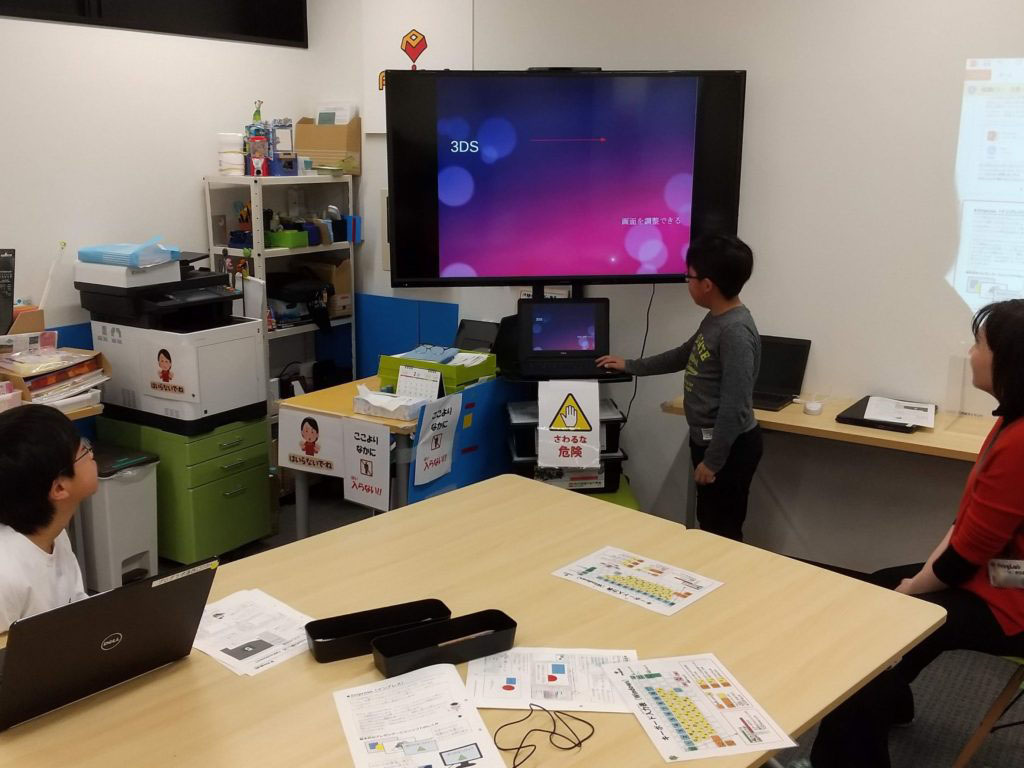
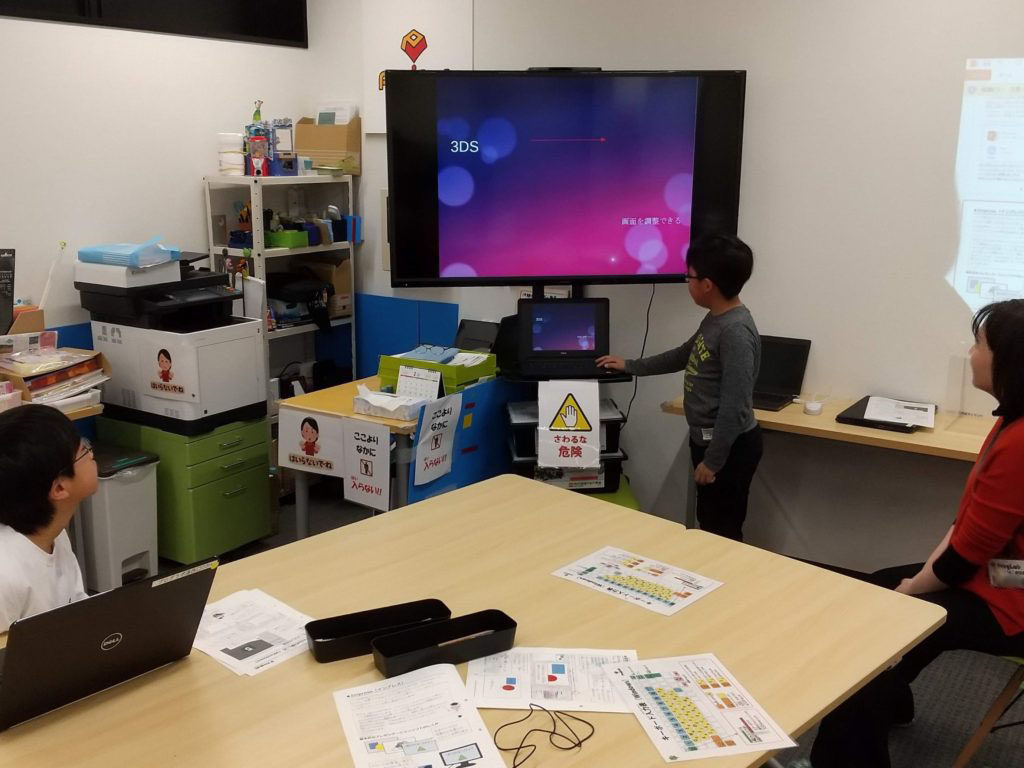
こちらの生徒さんの発表テーマは「僕とロボット」。

こちらの生徒さんのテーマは「僕とポケモンあるある」
講師の先生たちも座ってじっくり話を聞きました。
こちらの生徒さんは、スーパーマリオの歴史を発表してくれました。
内容について、一緒のクラスで学んでいるお兄ちゃんに、厳しくツッコまれたりしていました。
みんなの発表を見ていると、クイズ形式があったり、スライドが動いたりと楽しく伝わるよう、工夫されていました。
さて、この後、2月・3月は一年の学習の集大成に入っていきます!
大型のミッションに挑戦し、ここで学んだプレゼンテーションソフトの使い方を活かして、最後にプレゼンすることになっています。