子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
スタンダード1クラスで、歯車のしくみを使ったコマ回しの授業を行いました。
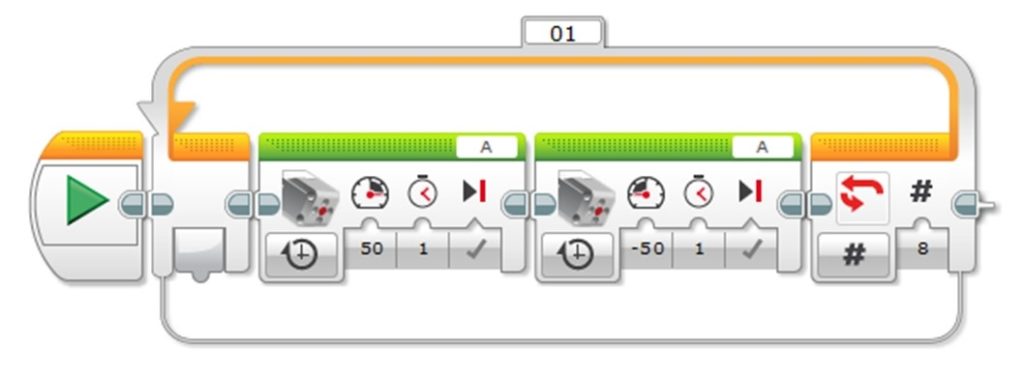
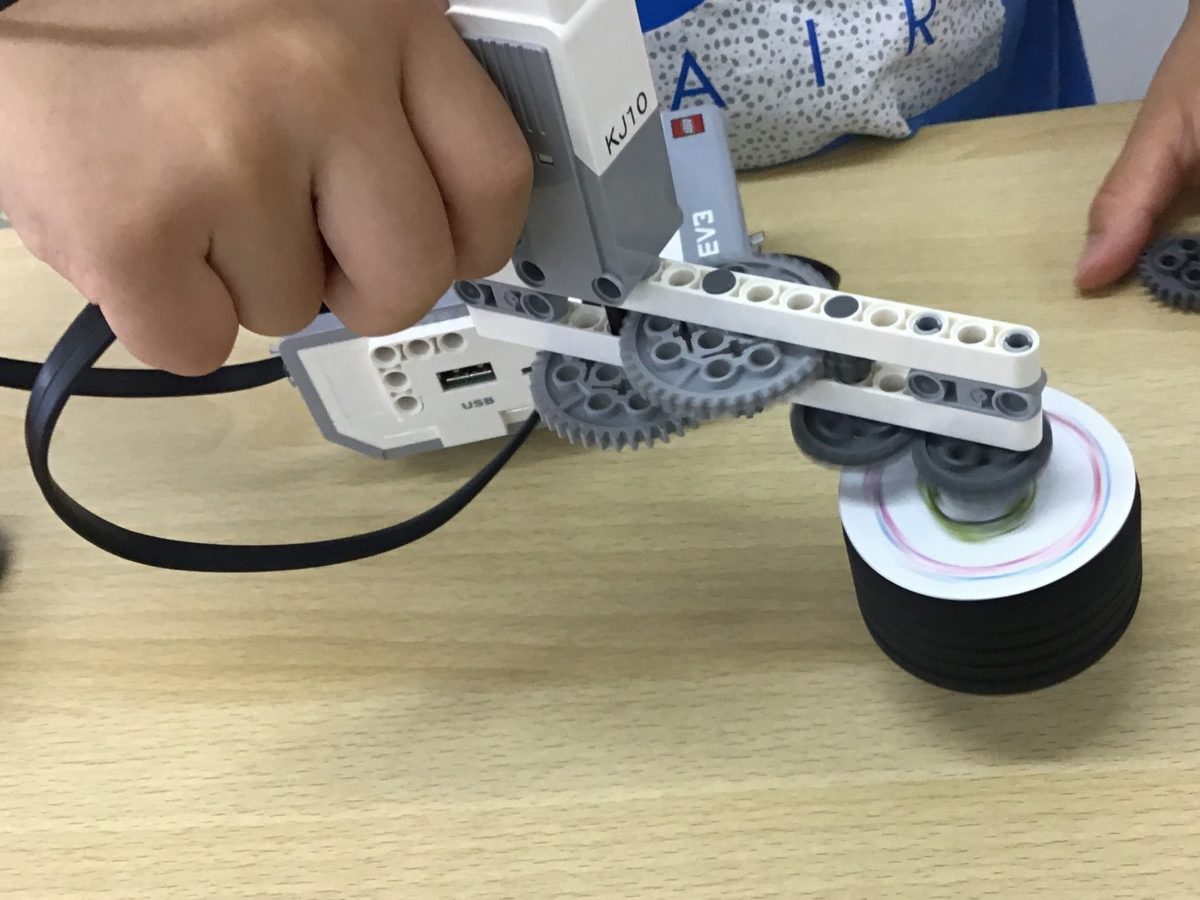
(ちょうど時計の短針と長針を1つのモーターでスピードを変えて回せるように・・・)大きさ(歯数)の違う歯車をうまく組み合わせると、回転のスピードを上げたり落としたりすることができます。
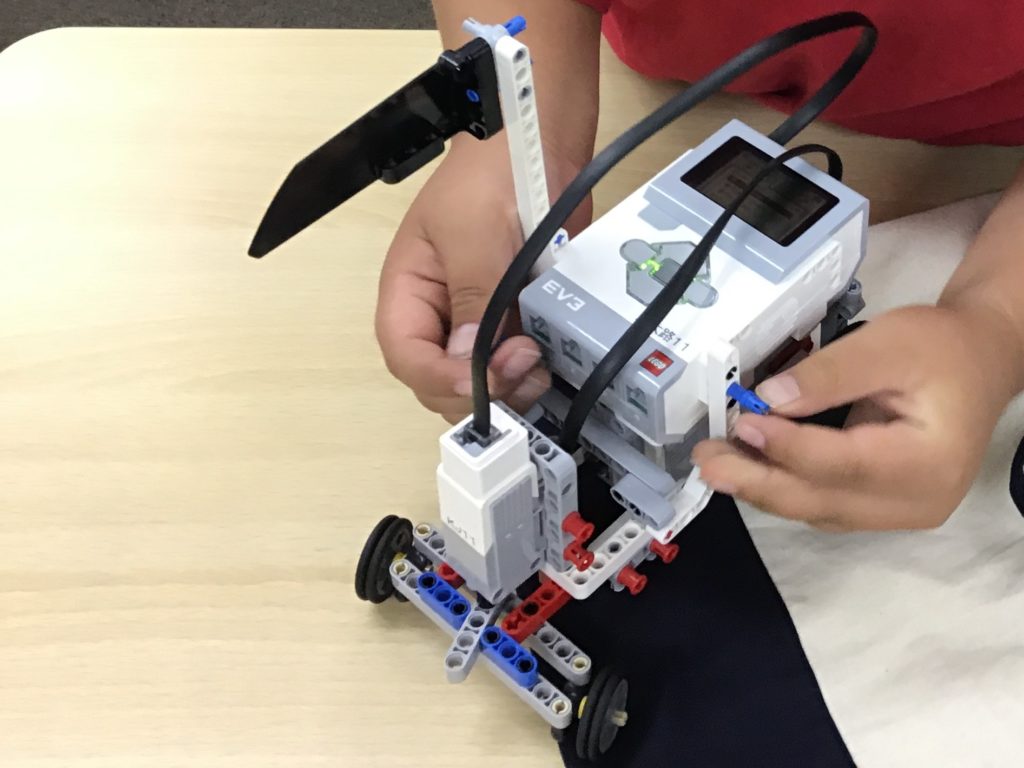
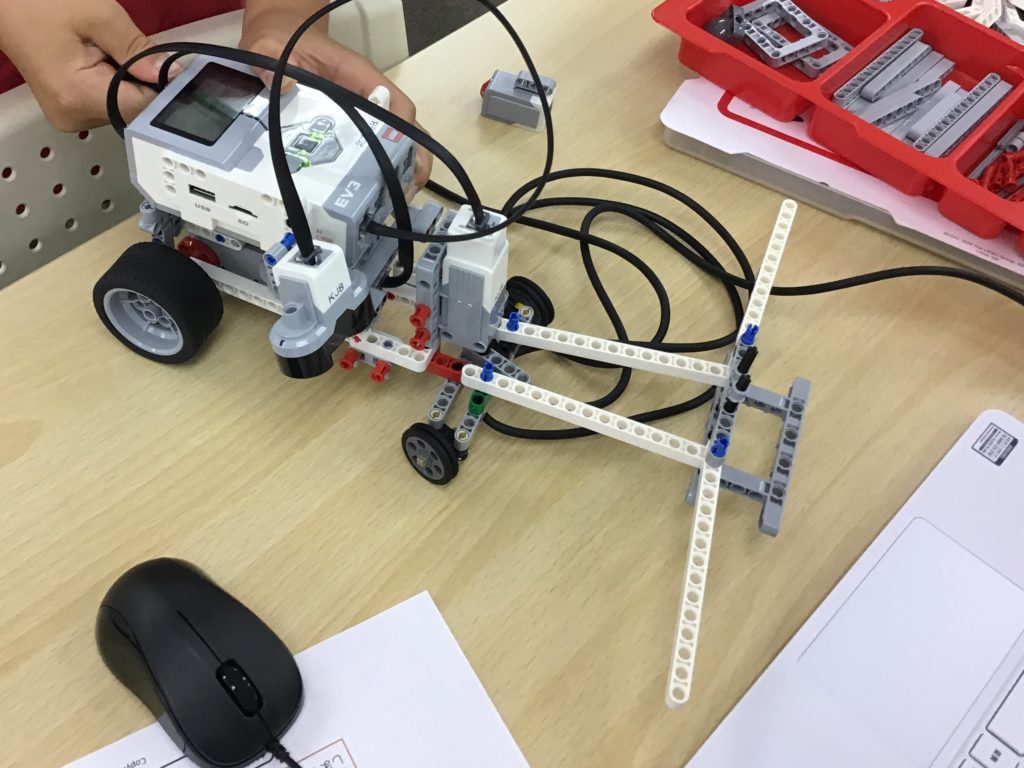
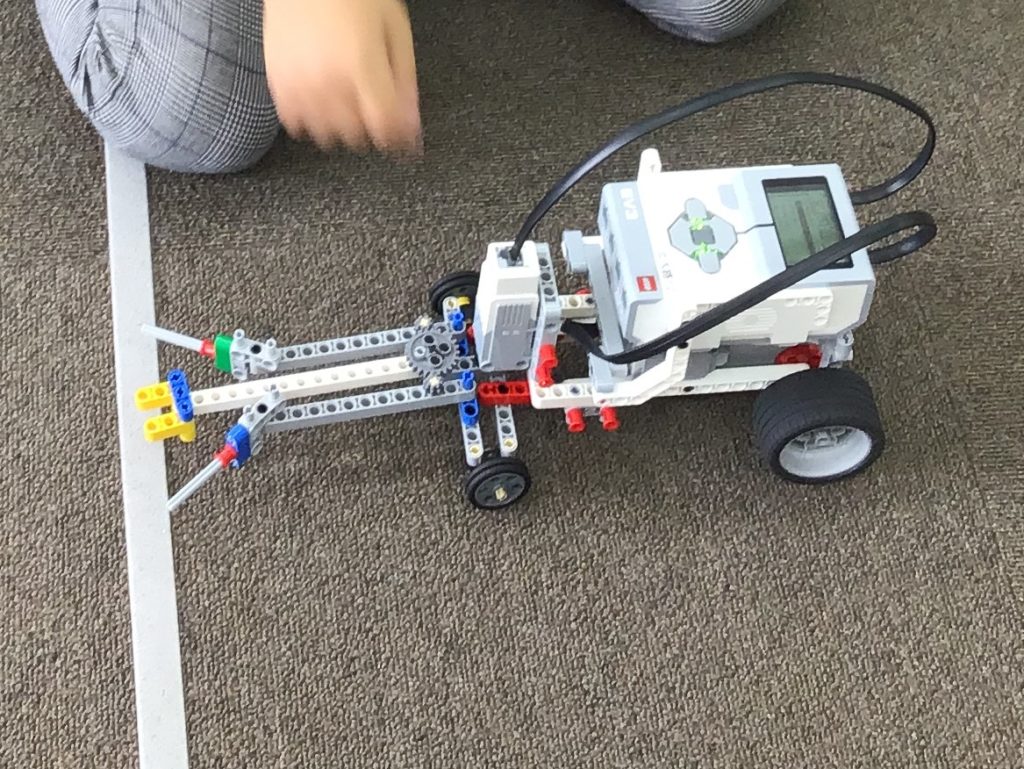
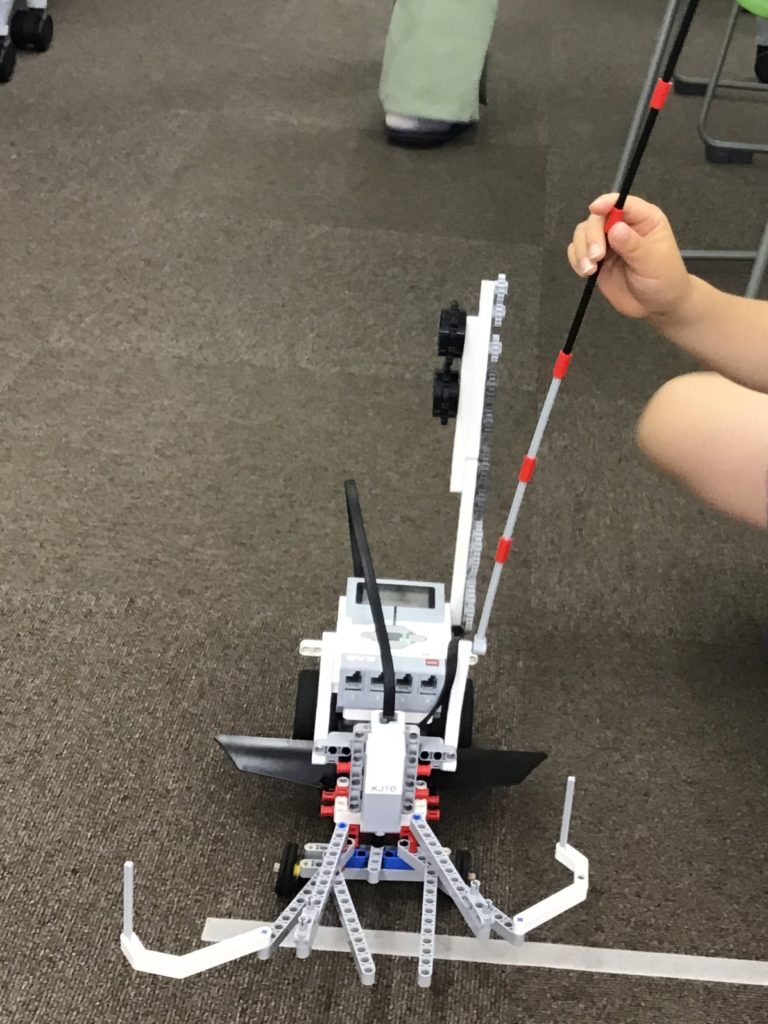
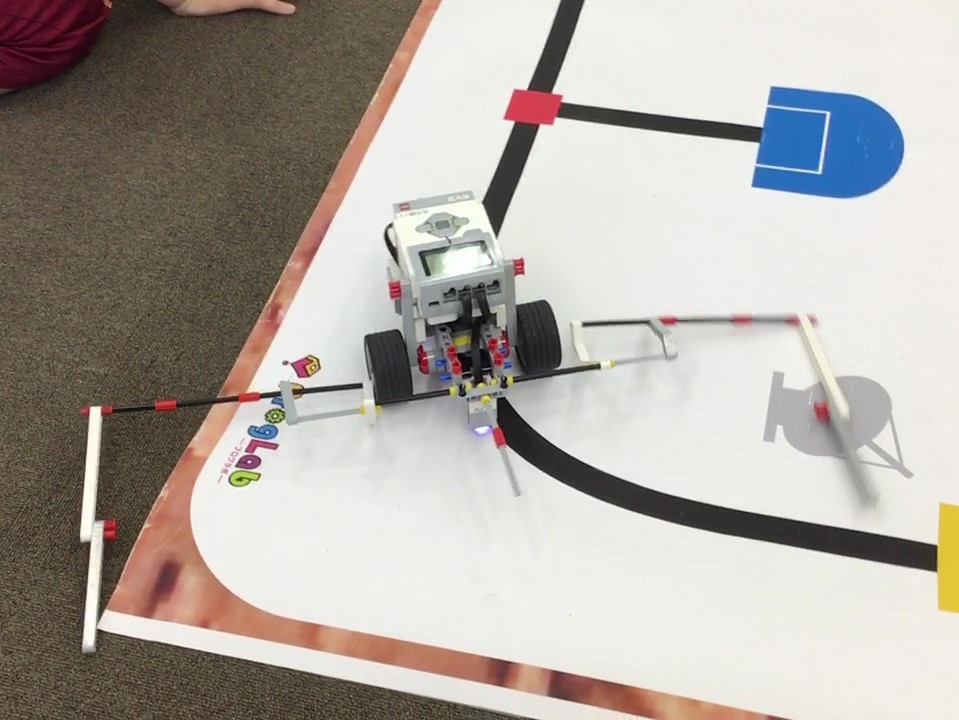
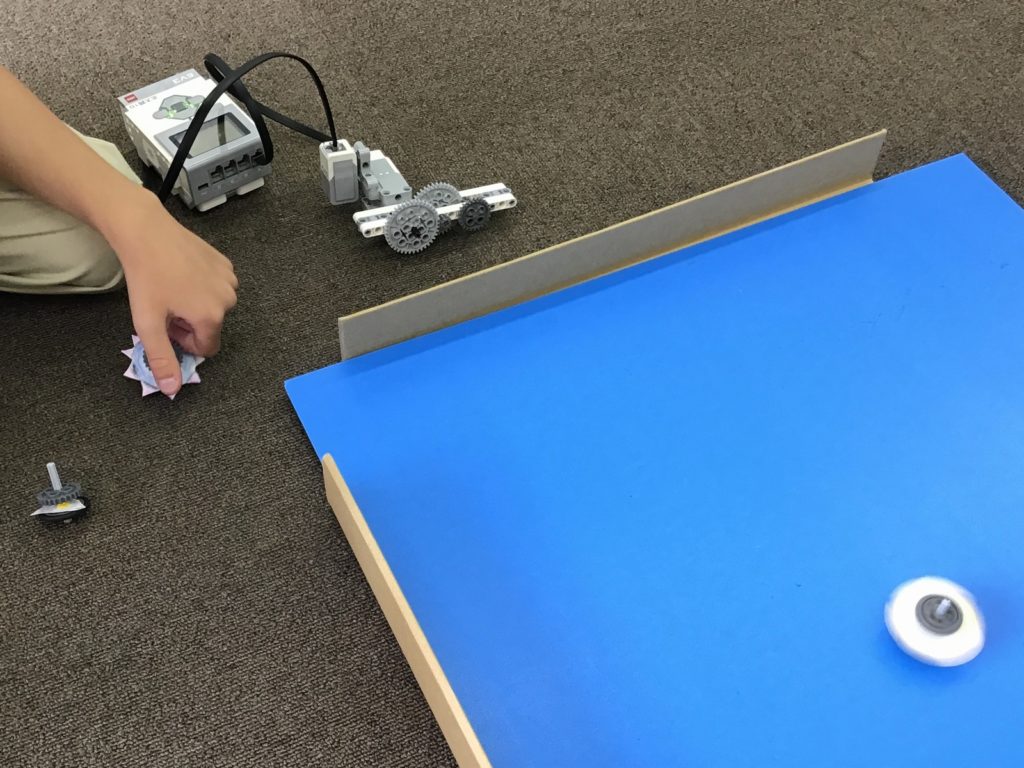
このような歯車のしくみを体感する授業として「コマ回しマシーン」その名も【スピントップシューター】を製作しました。
よく回るのはどんな形か、コマもオリジナルで開発します。
「来週はコマ回し大会だよ!」とお知らせすると、 よく回るコマについて家でベイブレードのアニメを見て、予習をしてきた生徒さんもいました。
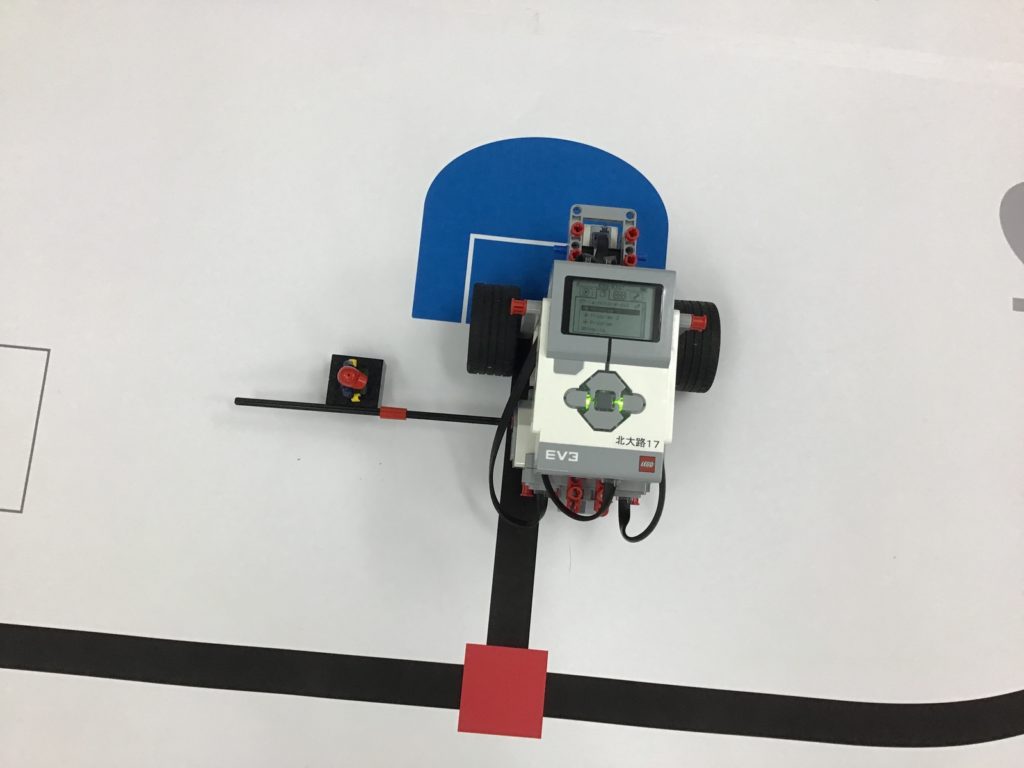
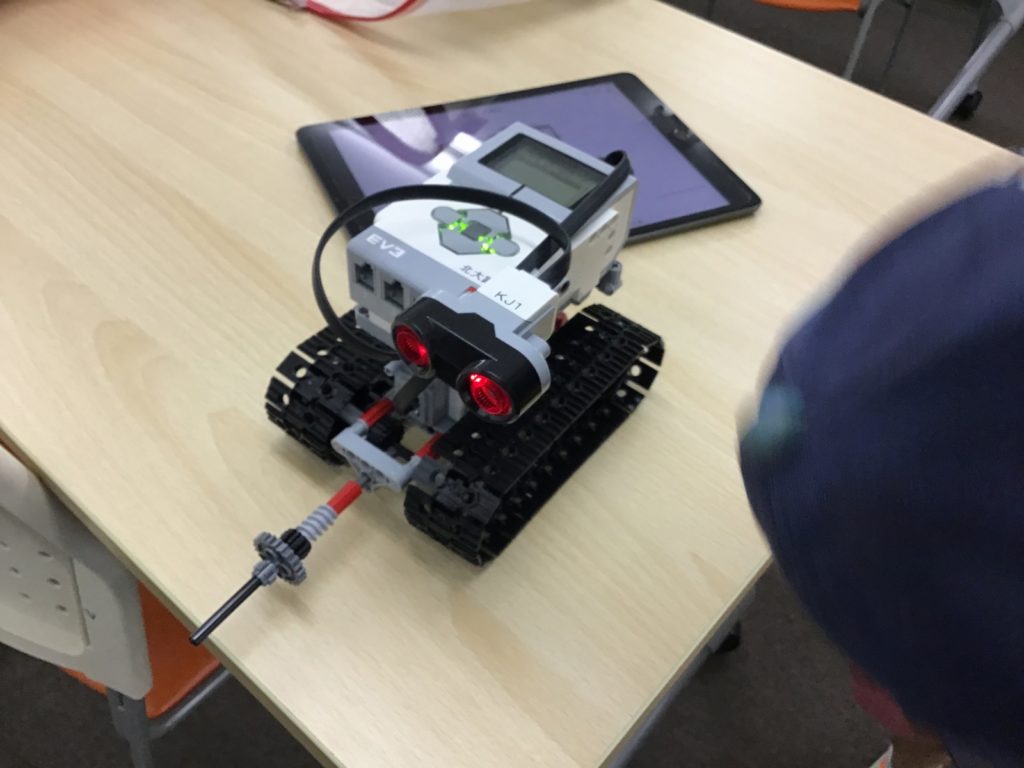
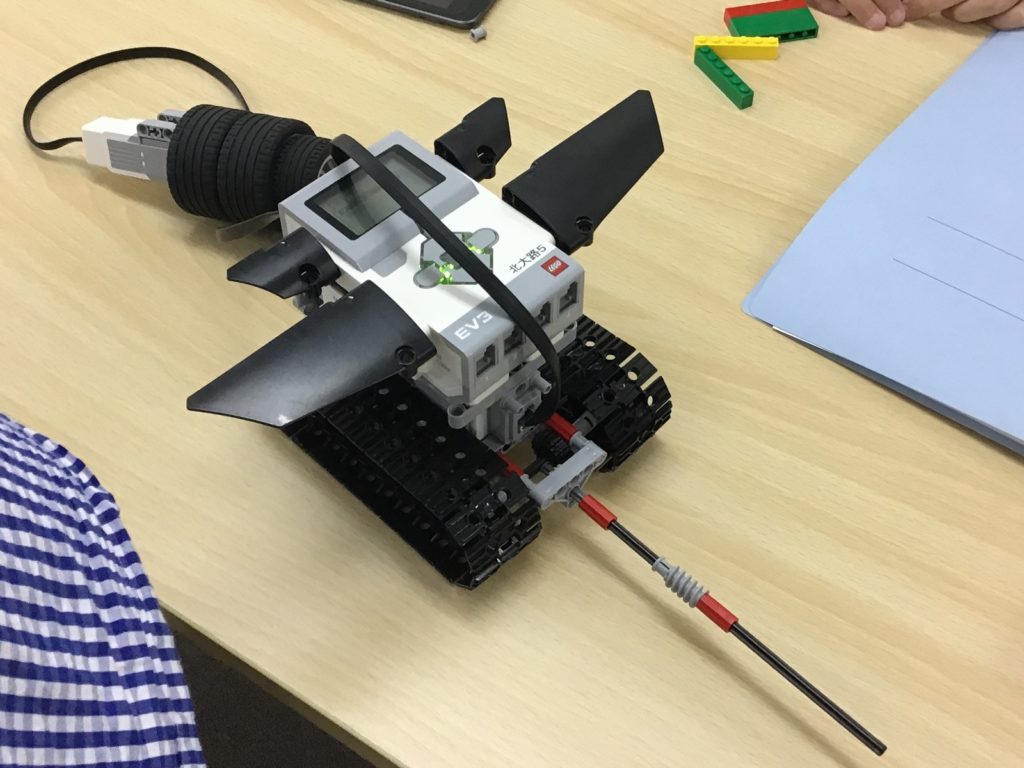
オリジナル改造で、いろんなパーツを付けてみたり、
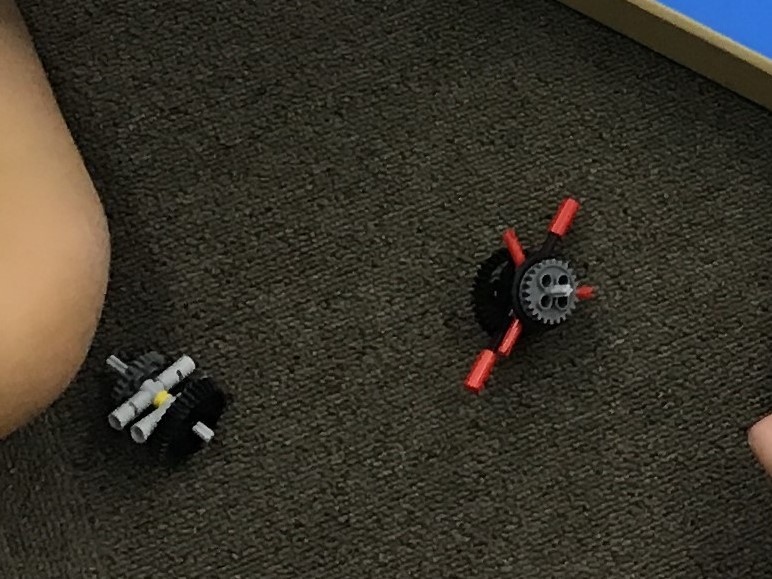
画用紙をギザギザに切って、色を塗ったり、、、

(ただ結果的には、シンプルな形状の方がよく回りましたが・・・)
そして、コマまわし対決をする子もいれば、
一人で回して楽しむ子もいました。
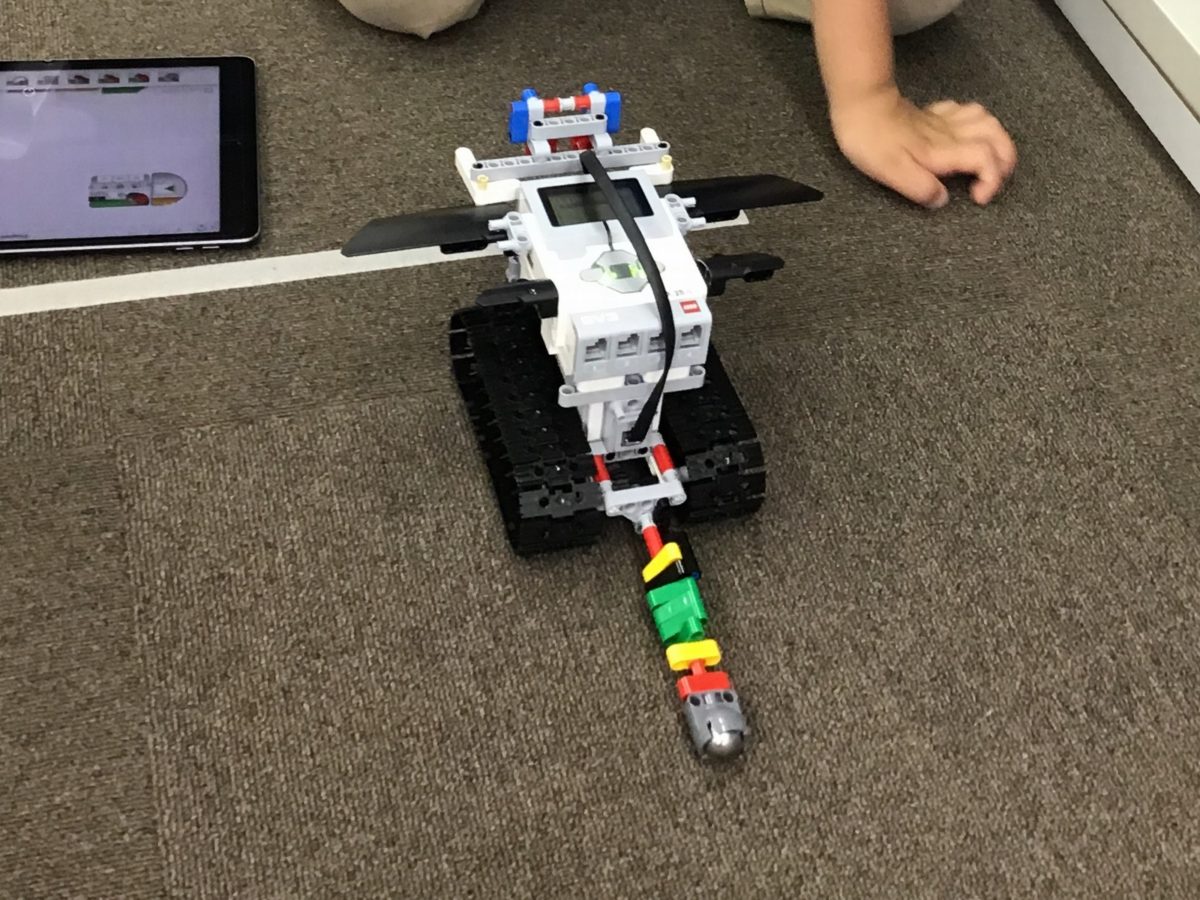
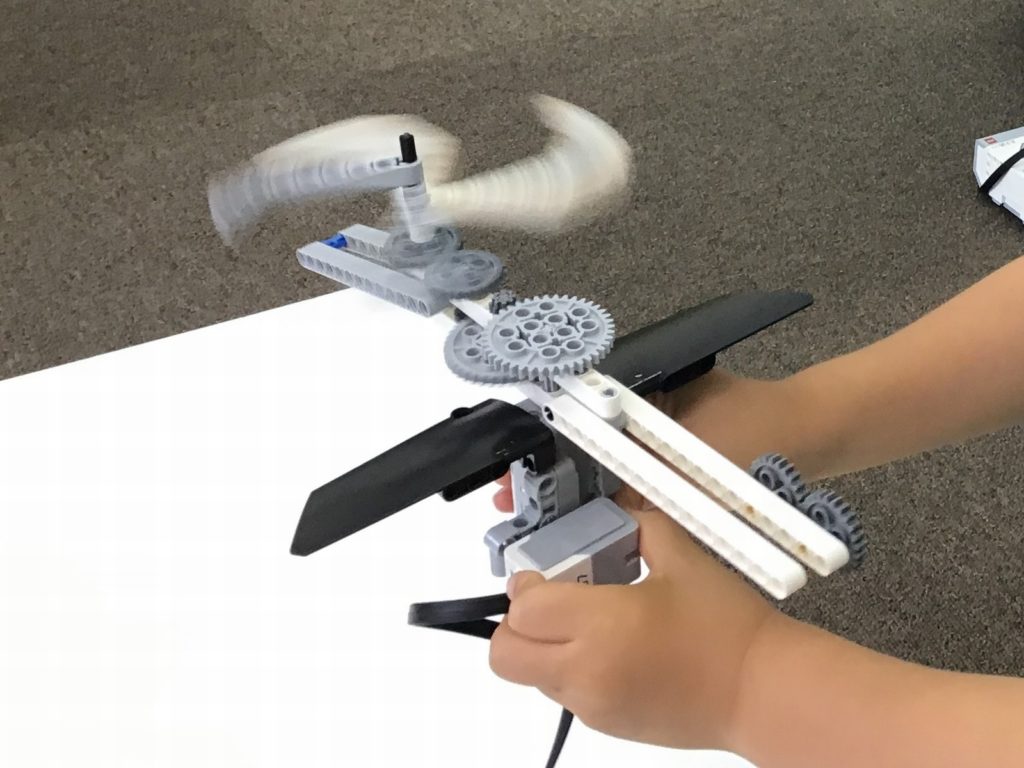
なぜか「ヘリコプター」になってしまう子も。
このスタンダード1コースを去年受講し、今年は1つ先のスタンダード2クラスに進んだ子ですが、「コマ回しだけはもう1回やりたい!」そうです。