子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
年末になり、プログラボの多くの教室では自由制作の作品展が開催されています。
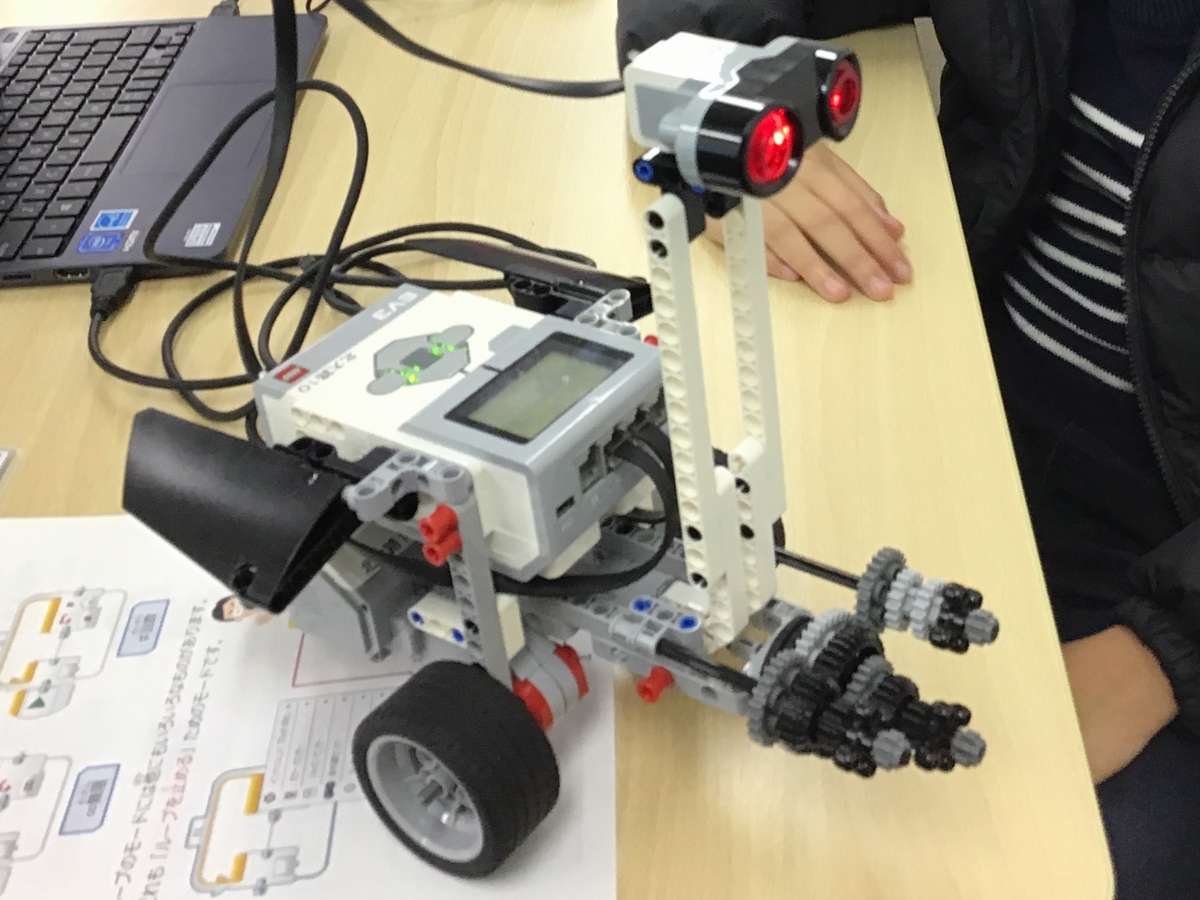
アドバンスト2以上のクラスの生徒たちは【自由制作】というものに秋から取り組んできました。
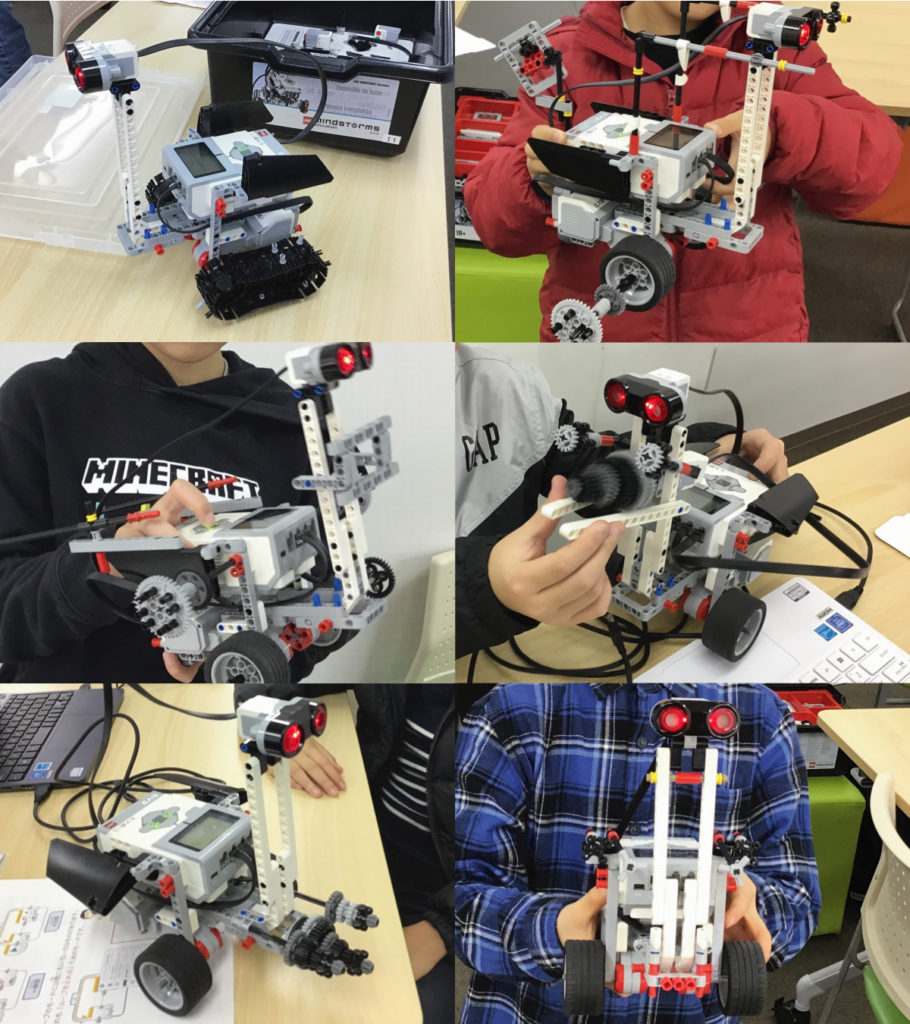
自由制作では、これまで作ったロボットや、プログラムを思い出しながら、チームを組んで自分たちのオリジナル作品を完成させます。
そして、作品展でいよいよお披露目となります。

こちらは京都エリア(京都市内の3教室)の合同作品展です。
12月中旬から洛西口教室→四条烏丸教室→北大路教室と3教室を巡回し、今日(12月25日)がいよいよ最終日、北大路教室での展示となりました。

こちらは【ゲームセンターゾーン】、向かって右からスマートボール風、クレーンゲーム風、ガチャガチャ風のマシーンたちです。

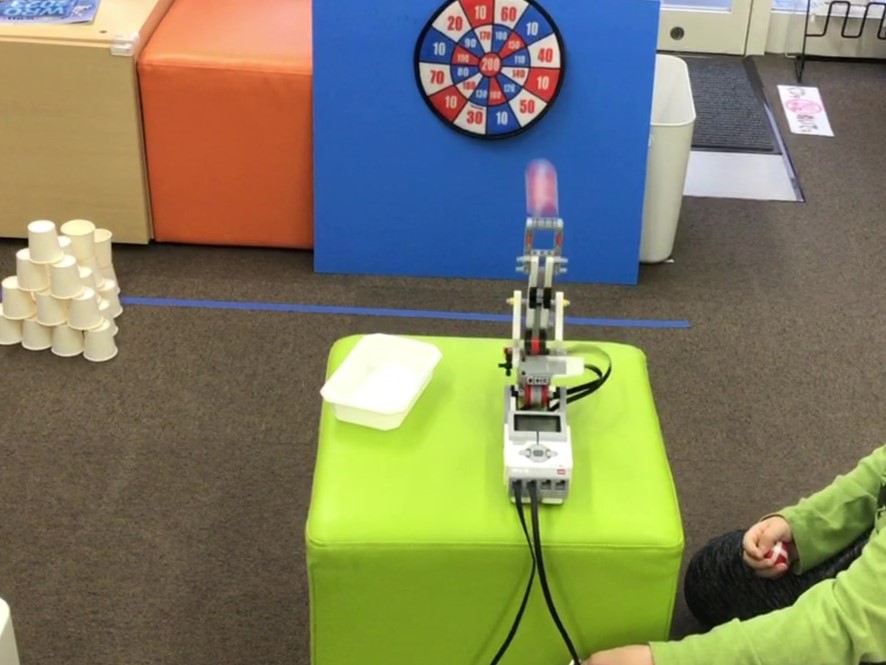
こちらは射的&歩行ロボットゾーン。
射的は毎年誰かが取り組む人気のテーマです。ボールを飛ばして的を狙いますが、うまく当てるのが結構難しい!

こちらは一番人気の【GBCゾーン】。16人の合作となる最大の作品で、様々なからくりを駆使して、ボールを受け渡しながら一周させる装置です。
もちろん、作品を作った本人も見に来ていましたが、もう少し下のクラスに通っているお子さんとそのご家族も、楽しみに見に来られていました。
「すごく難しそうなんですが、何年生ぐらいの作品ですか?」
「うちの子もこんな作品作れるようになるんですか?」
と質問されていました。
これまで学んだロボットやプログラミングをベースにオリジナルの工夫を加えていったり、また、過去の作品の紹介動画や写真・制作工程が残っているので、それをマネするところから始めて、より面白い作品にブラッシュアップさせたり・・・という感じで、知識や技術というよりは、どちらかというと、企画力や応用力、あるいは完成させる力が試させるような取り組みになるのかなと思います。
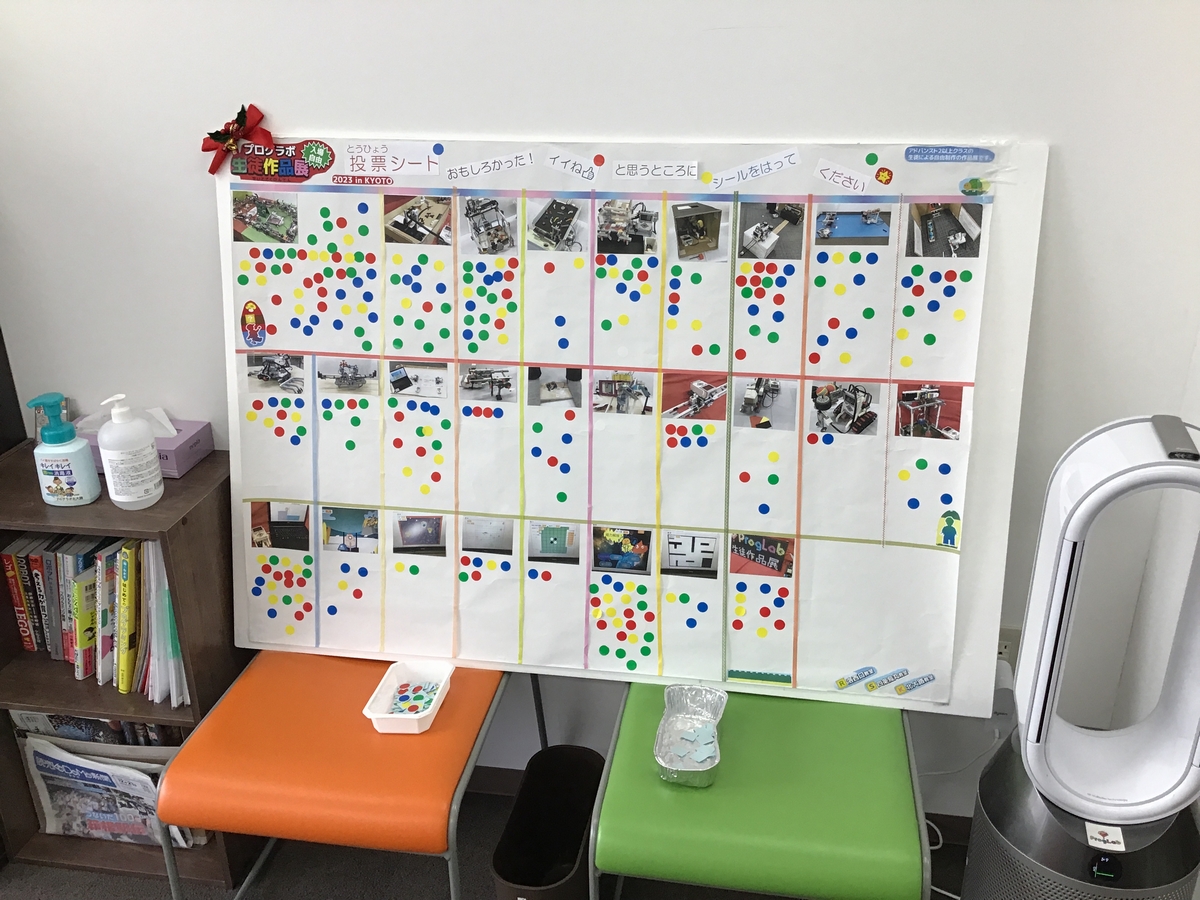
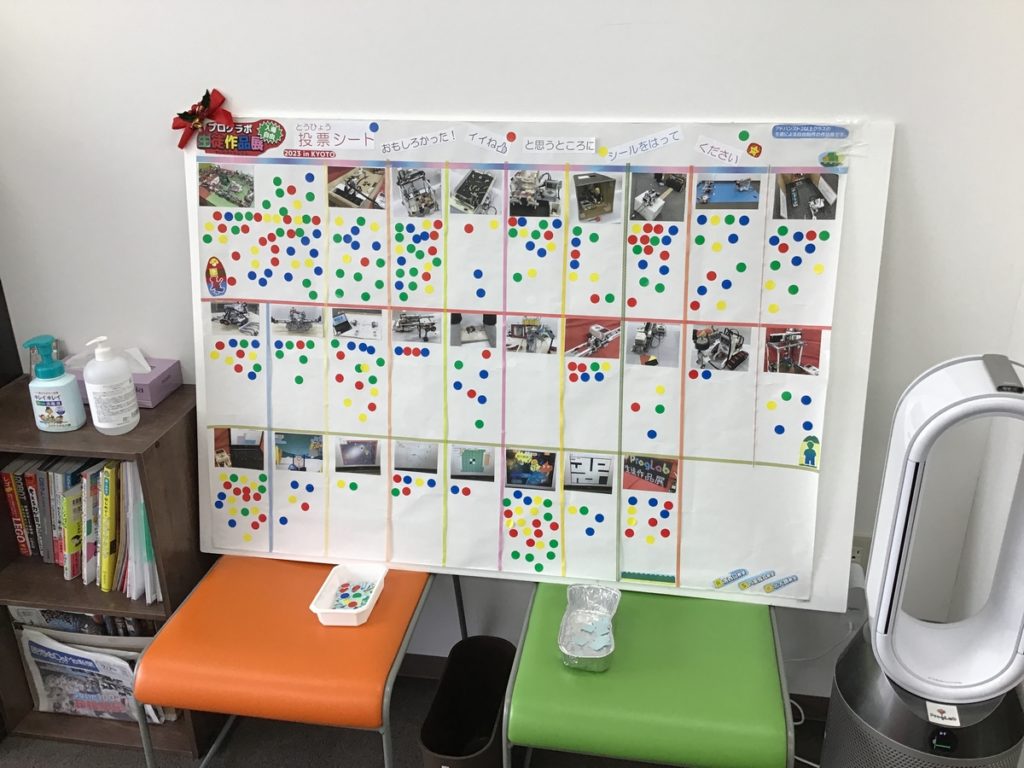
最後に、どの作品がおもしろかったか、すごいと思ったか、来場者の皆さんに投票していただきました。
→プログラボの詳細と無料体験会のお申し込みはこちらから