子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
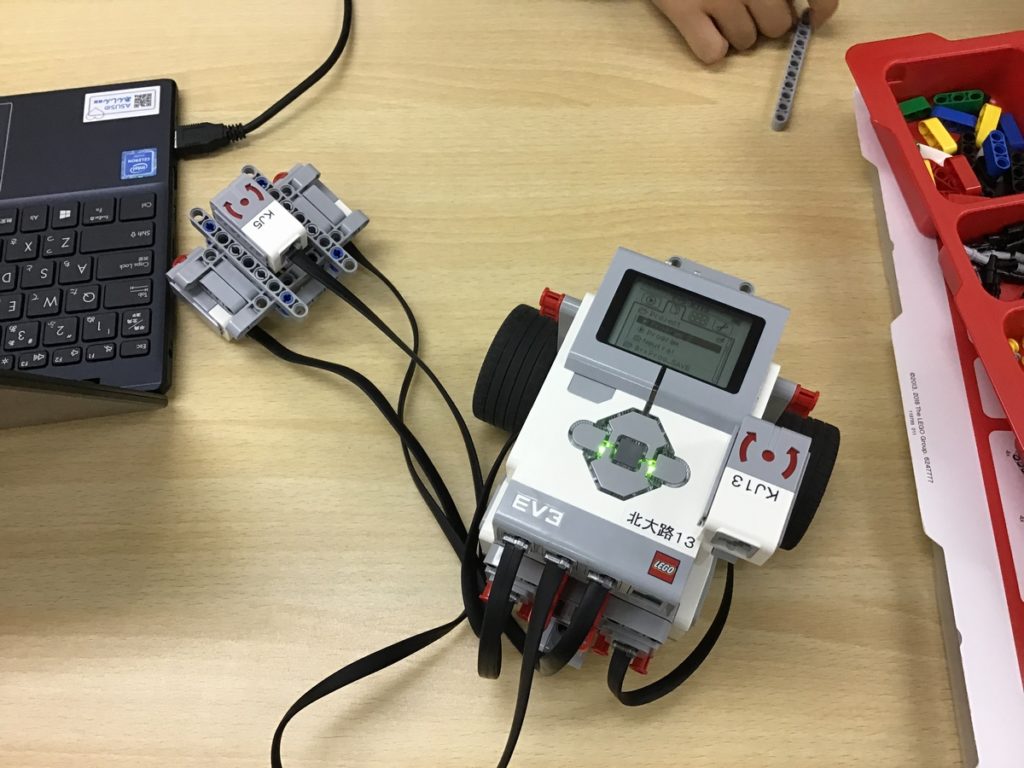
スタンダード1クラス、12月はフォローイングダックという名前のロボットを作りました。
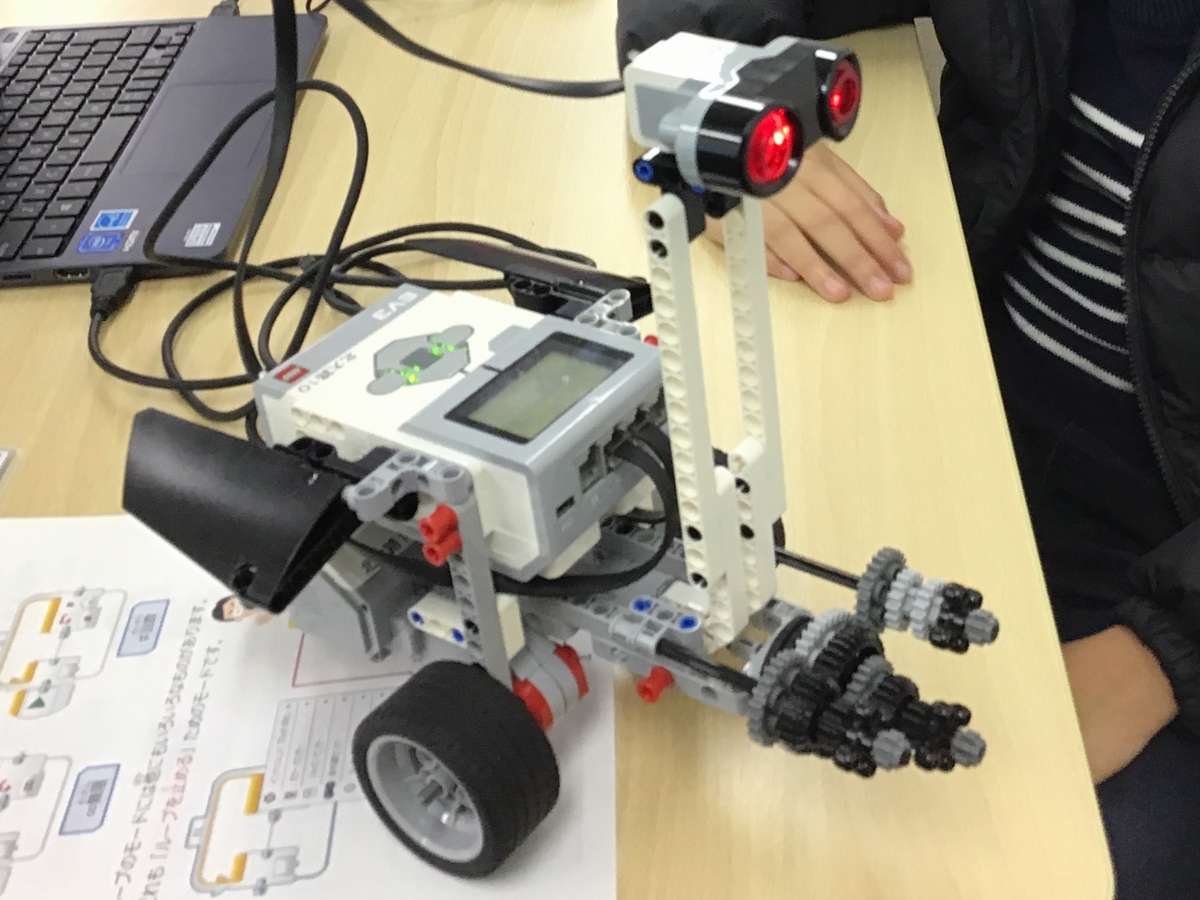
フォローイングダックはカルガモの引っ越しの様に、後ろをついてくるロボットです。
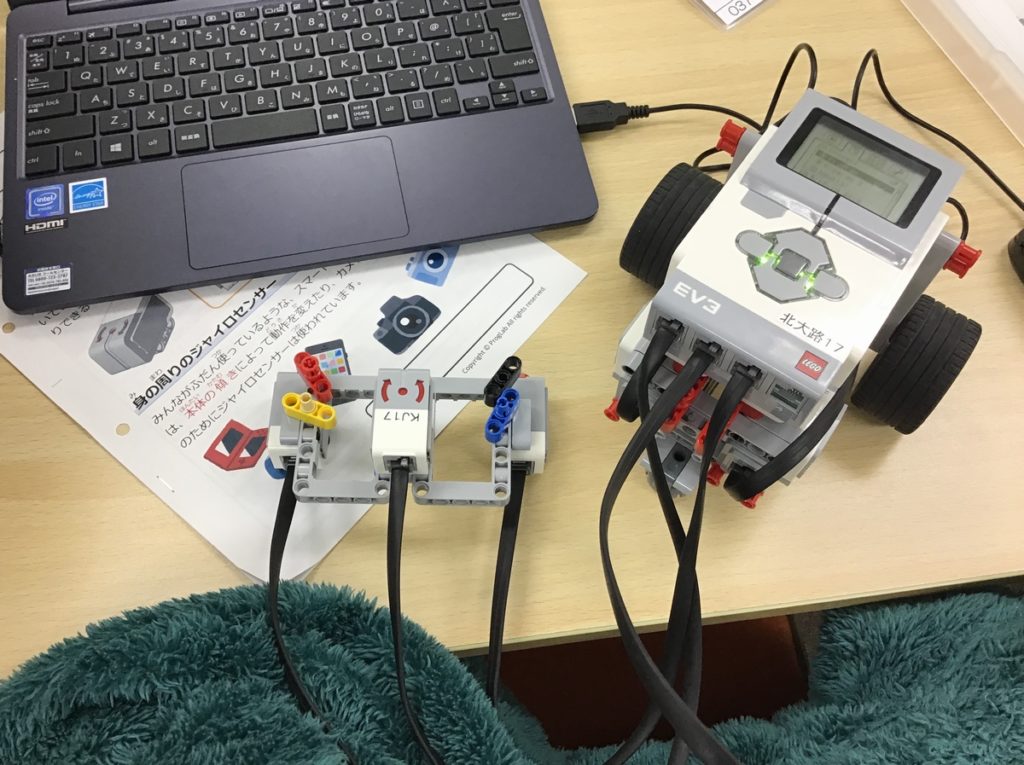
超音波センサーで計測した距離で、近くに何も無い場合はぐるぐる回って、近くに何か(親鳥?)を見つけたらついてきます。
ここで、場合分けのプログラム「スイッチ(switch)」を初めて学ぶことになりました。
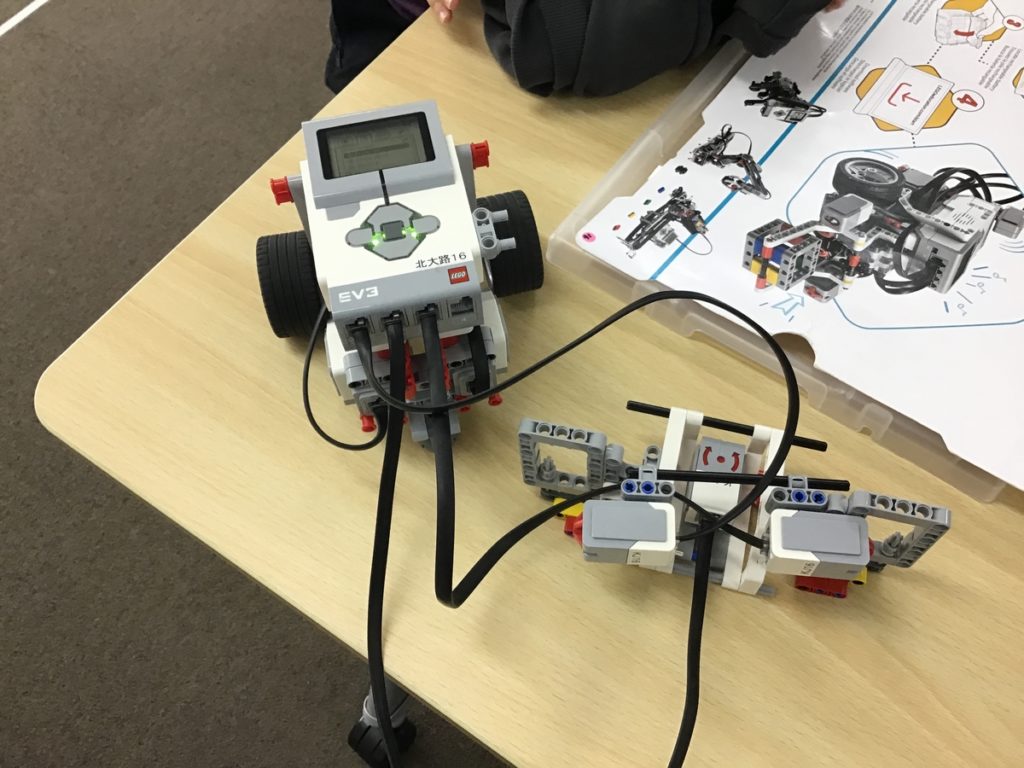
動きをプログラミングができたら、みんな思い思い、オリジナルのロボットに改造して完成です!
この「改造」が意外と重要で、何か”思いつき”や”ひらめき”が無いと改造はできず、引いてはそれが、今後の”問題解決のアイデア”につながるように思います。
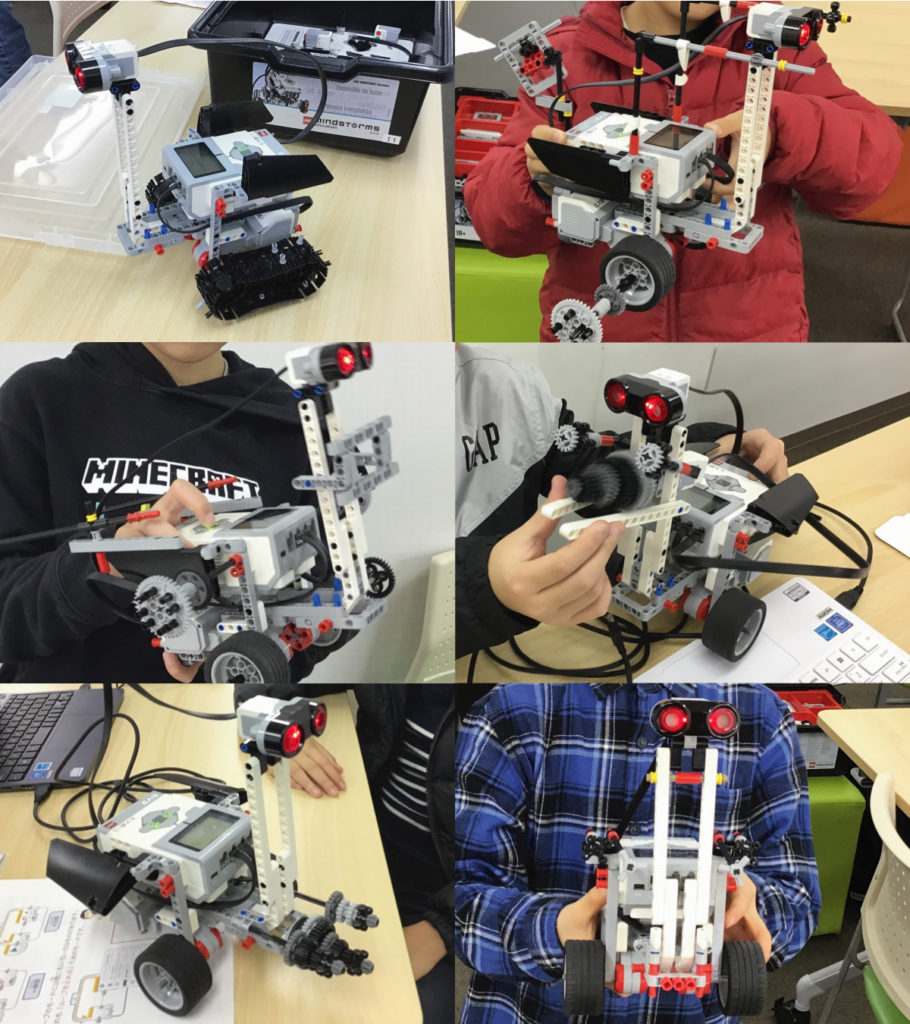
自分で改造した鳥ロボットは、心なしか丁寧に持ち運んでくれているような気がします。