子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
スタンダード1クラスでは、4月からパソコンでのプログラミングを始めました。
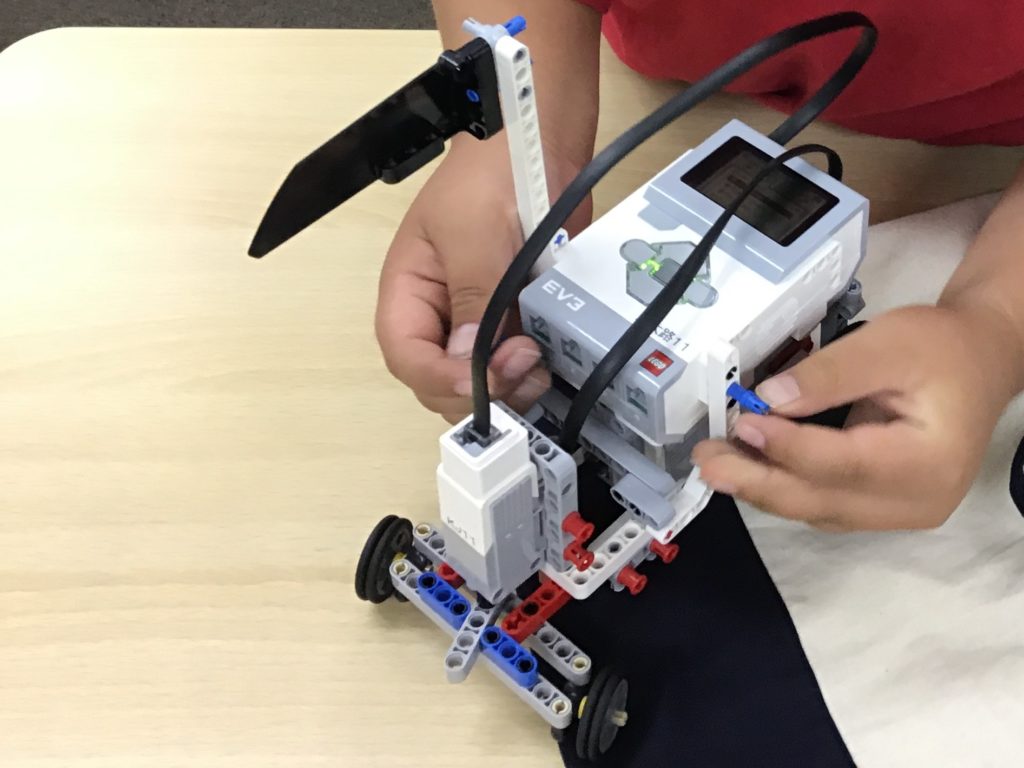
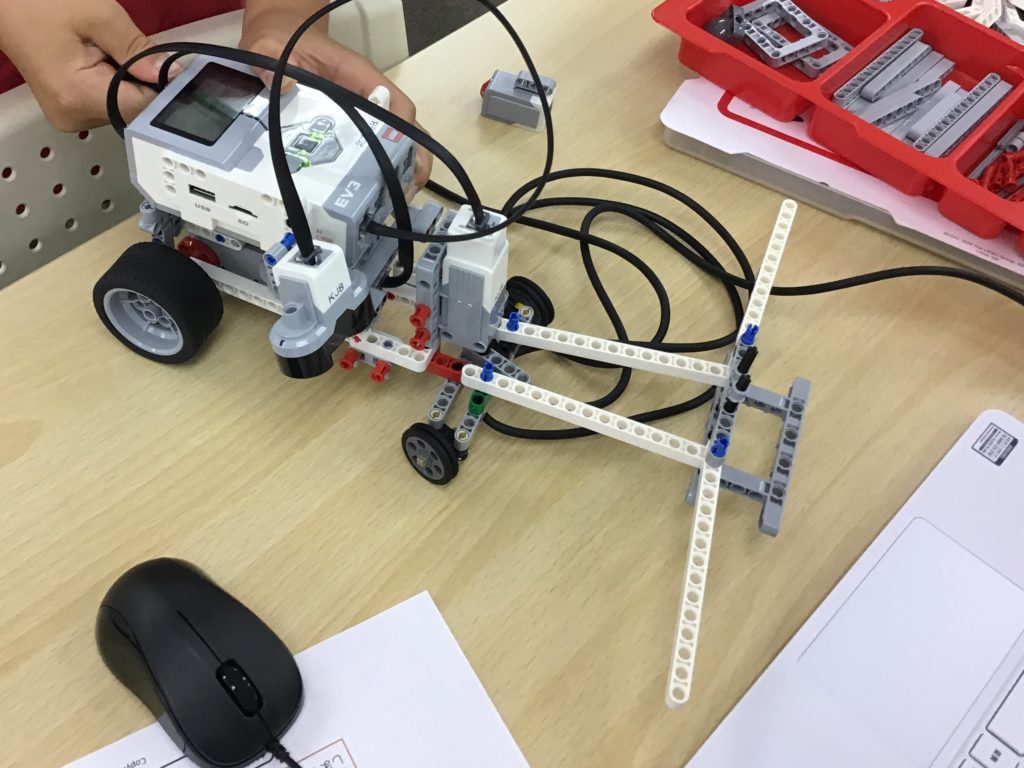
ただ、4月はパソコンにつないだまま「移動しない」ロボットをプログラミングしましたが、5月になって タイヤの付いた「移動する」ロボットをプログラミングするようになりました。
「移動する」「移動しない」、そんなに違いがないように思いますが、移動するロボットは、プログラムを一度ダウンロードして、それをコースまで持って行って起動させるという操作が必要になるのが、移動しないロボットとの最大の違いです 。(移動しなければ、パソコンと接続したまま、起動できるので、ダウンロードが必要ありません。)
という訳で、そのダウンロードの練習や、動きが違ったらコースのところから持って帰ってプログラムを修正する、というのが5月の主な目的になっています。
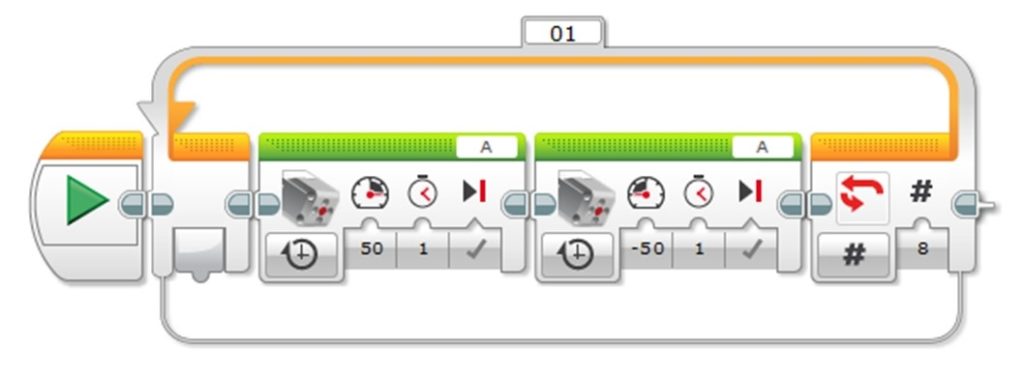
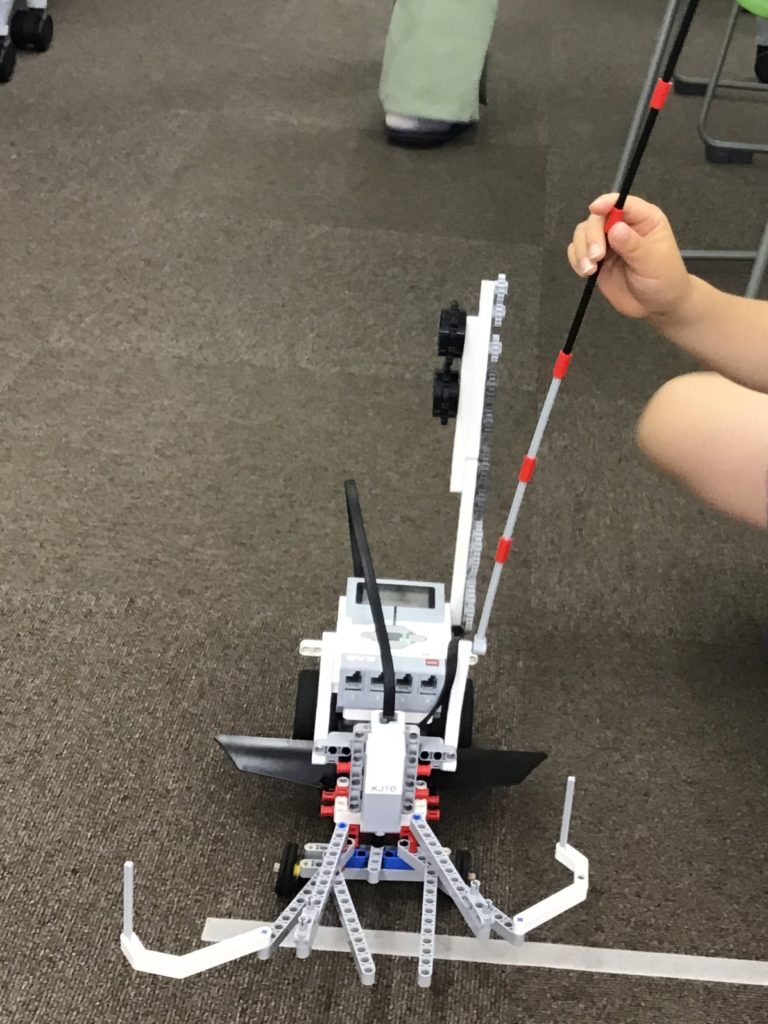
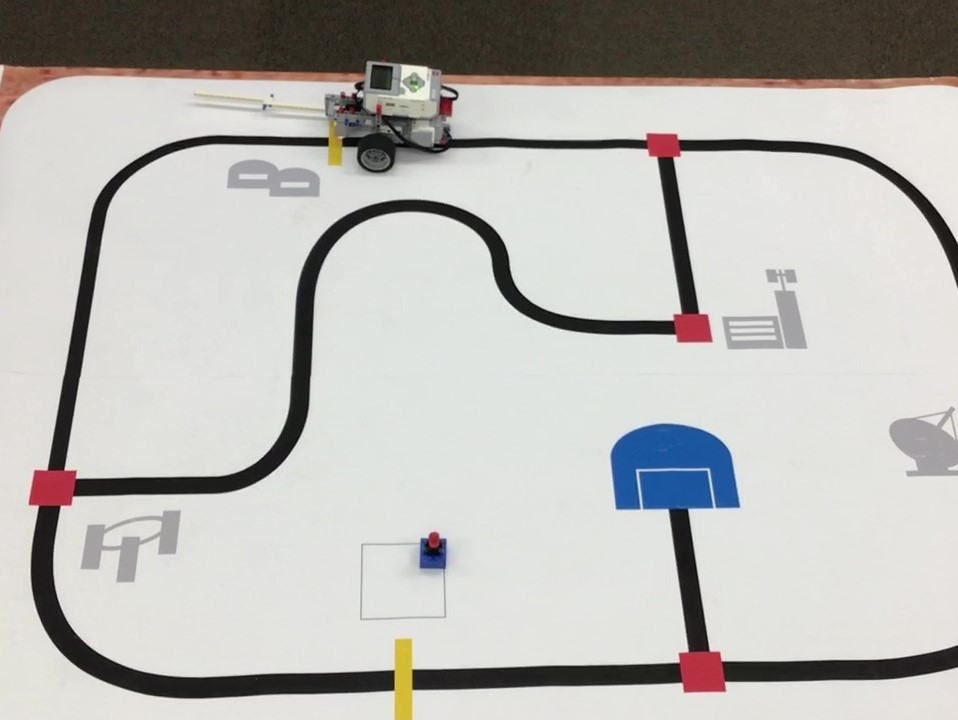
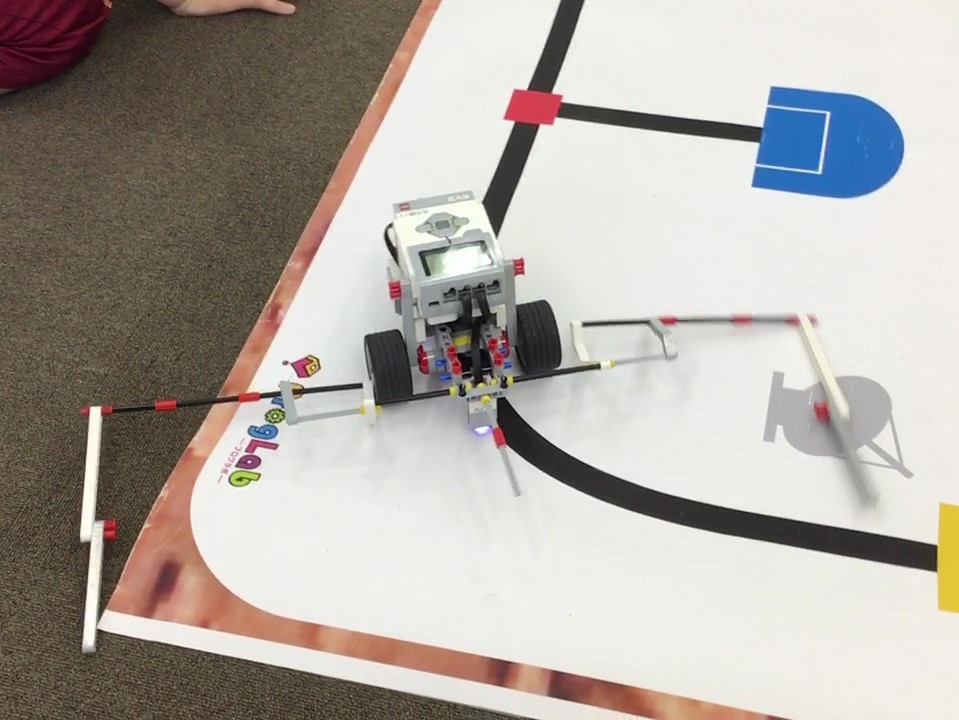
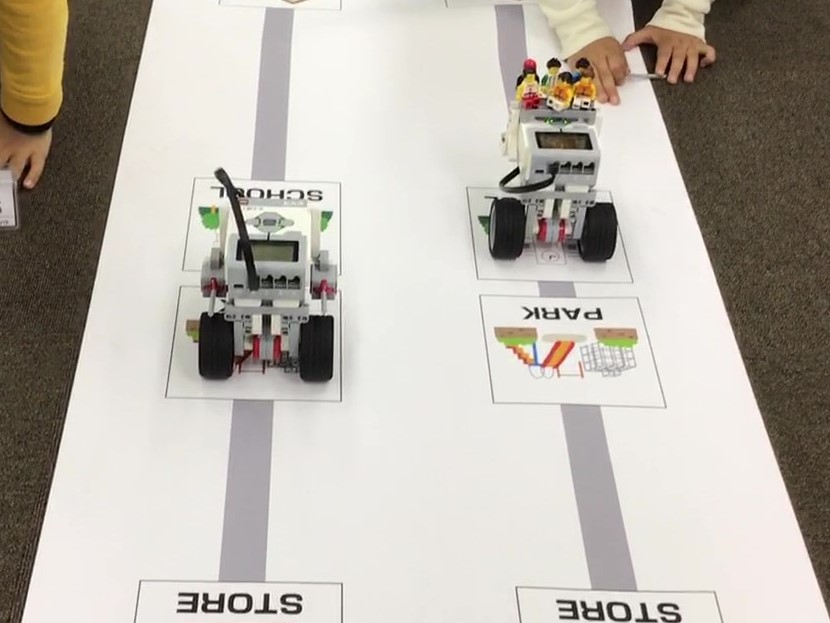
「HOME」「SCHOOL」「PARK」「STORE」「PROGLAB」と書かれた目的地を電車の駅に見立てて、自動運転で駅にピッタリ止まれるプログラムを作ろう!というミッションにまずは挑戦しました。
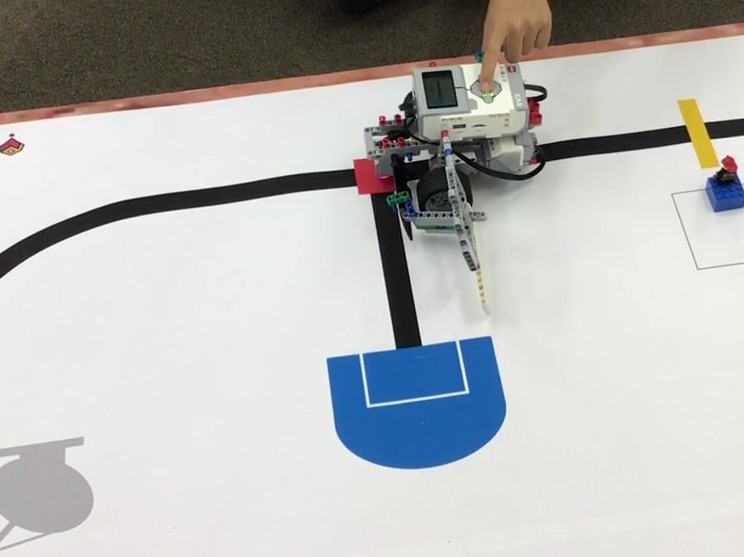
駅と駅の間はモーターの回転数(つまりタイヤ何回転分)で合わせます。ただ、最後の「STORE」と「PROGLAB」の間は1回転では足りなくて、2回転では行き過ぎるように作られています。
1と2の間の数字って何かな?ということで、「1.5」という数字を入力することになりますが、多くの子どもは小数点がキーボードのどこにあるのか分かりません。ということで、先生にキーの場所を教えてもらって、入力しました。(小数自体をここで初めて知る子もいますが、意外と小数はすぐ理解できます。)
これができたら、今度はバックで「HOME」まで帰ってきたいと思います。そこで必要になるのが、モーターを逆回転させてバックする「マイナス」の入力。やっぱりキーボードのマイナスの位置も分かりませんので、 今度も先生にキーの場所を教えてもらって、入力しました。
さて、その翌週は・・・
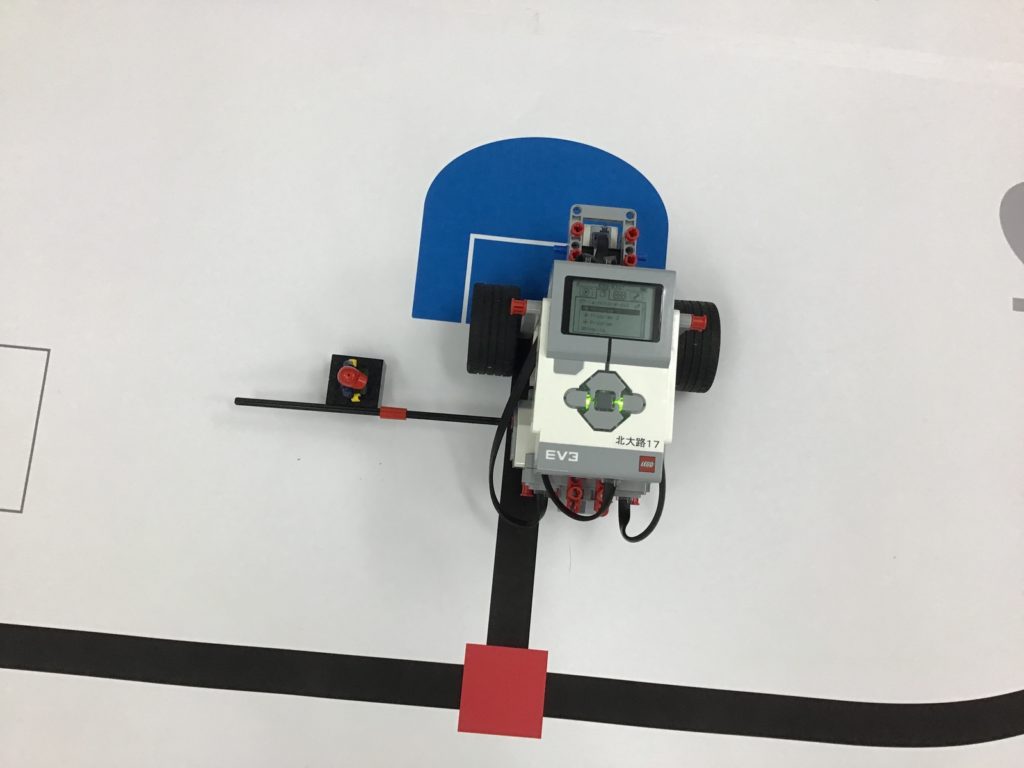
電車の車内の電光表示のように、画面に絵や字を表示させるプログラムに挑戦しました。
中には小学校の授業で文字の入力をやったことのある子もいますが、もちろん初めての子もたくさんいます。文字を一生懸命探して、1文字1文字入力していった結果・・・
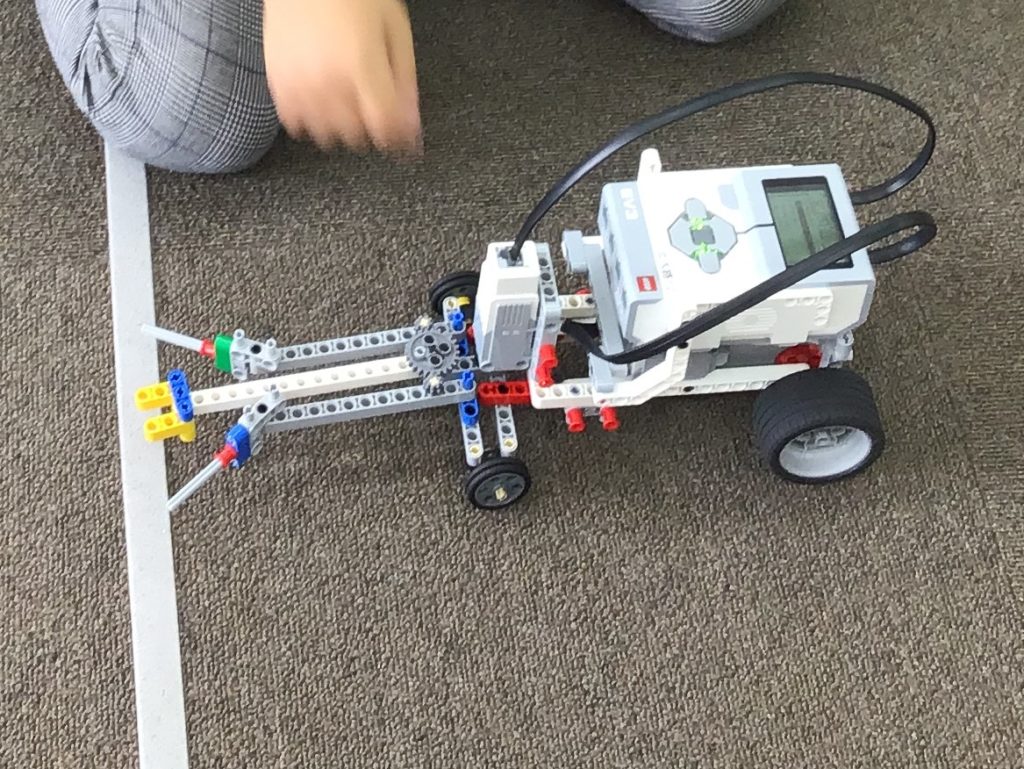
こんな感じで電車の自動運転のシステムが完成しました♪
あとは自由に改造して、乗客を乗せたりしてオリジナル電車の完成です!


→プログラボの詳細と無料体験会のお申し込みはこちらから