子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
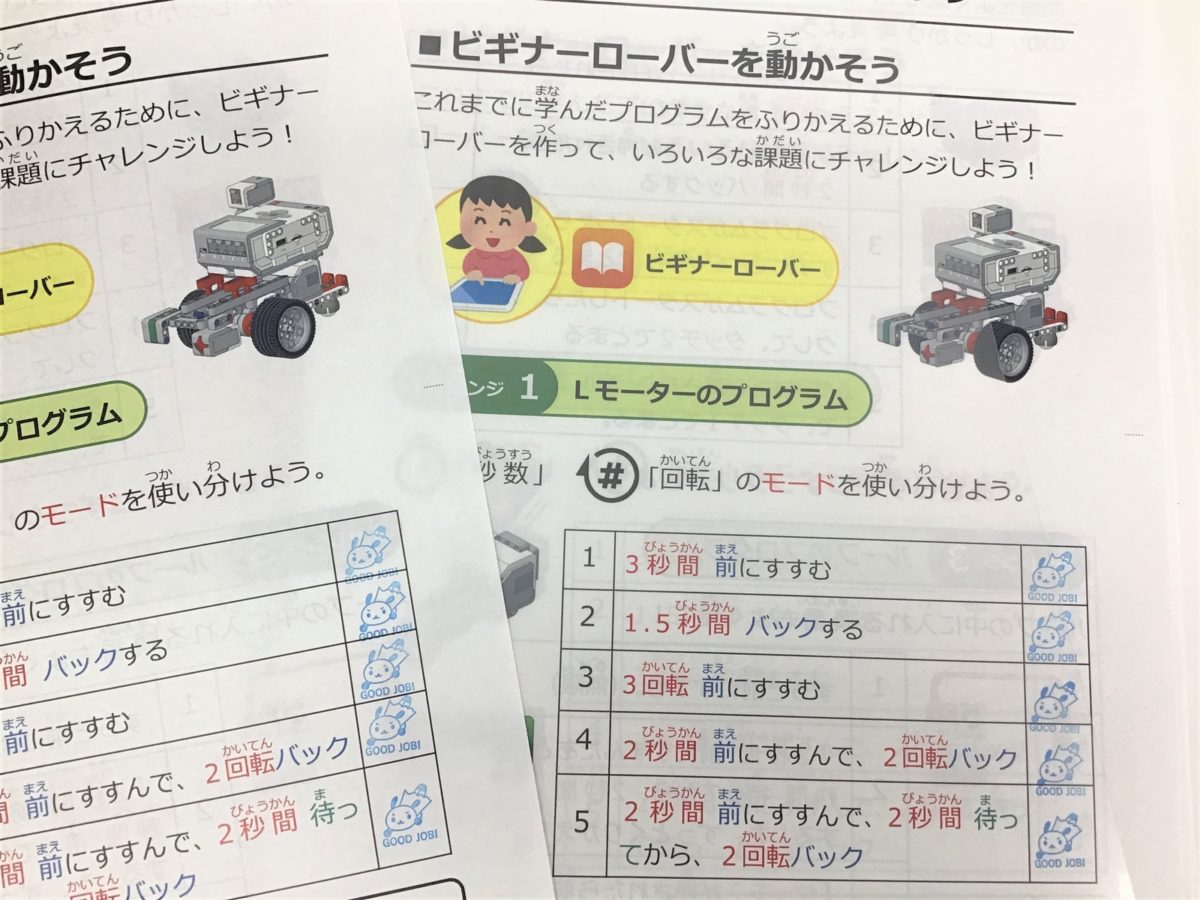
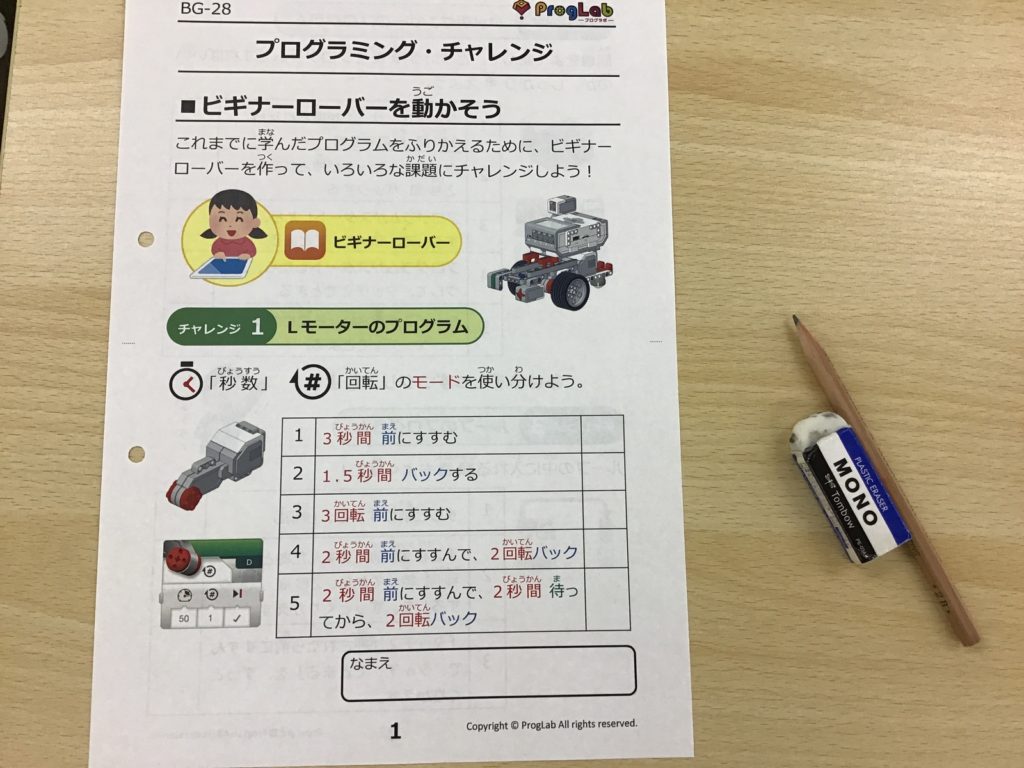
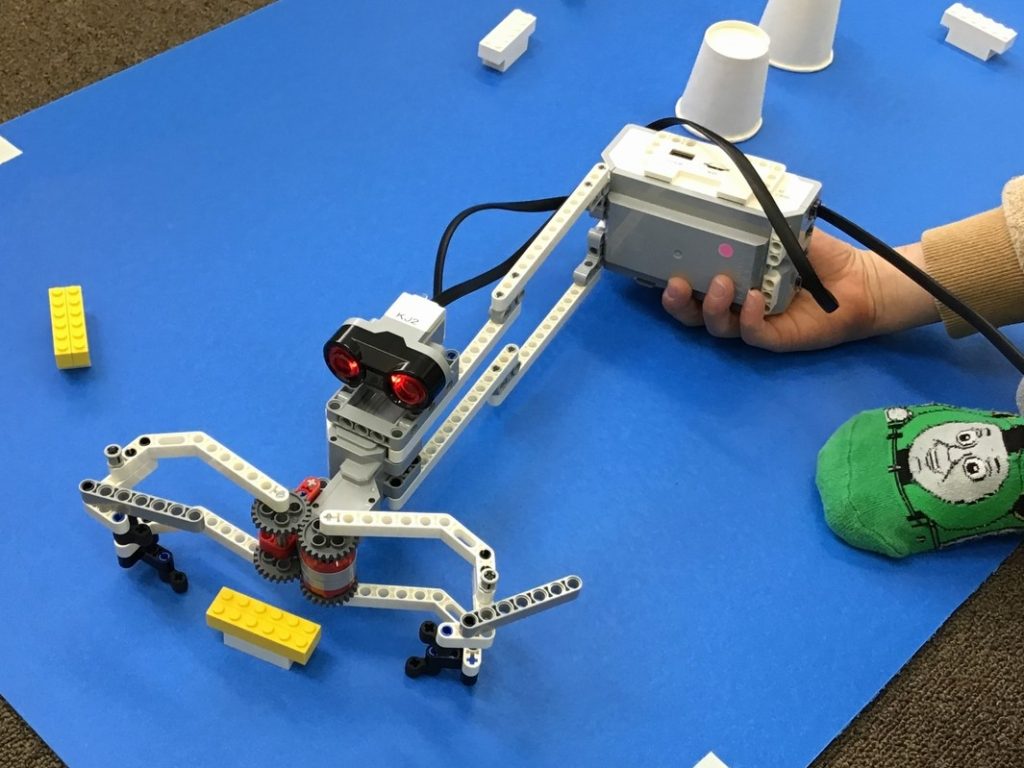
ビギナークラスでは、超音波センサーを使うロボットのプログラミングをしています。
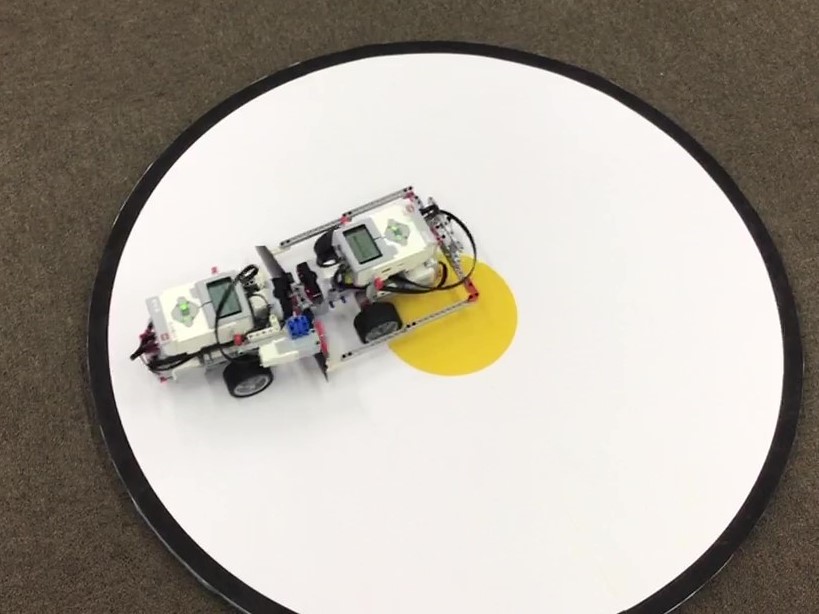
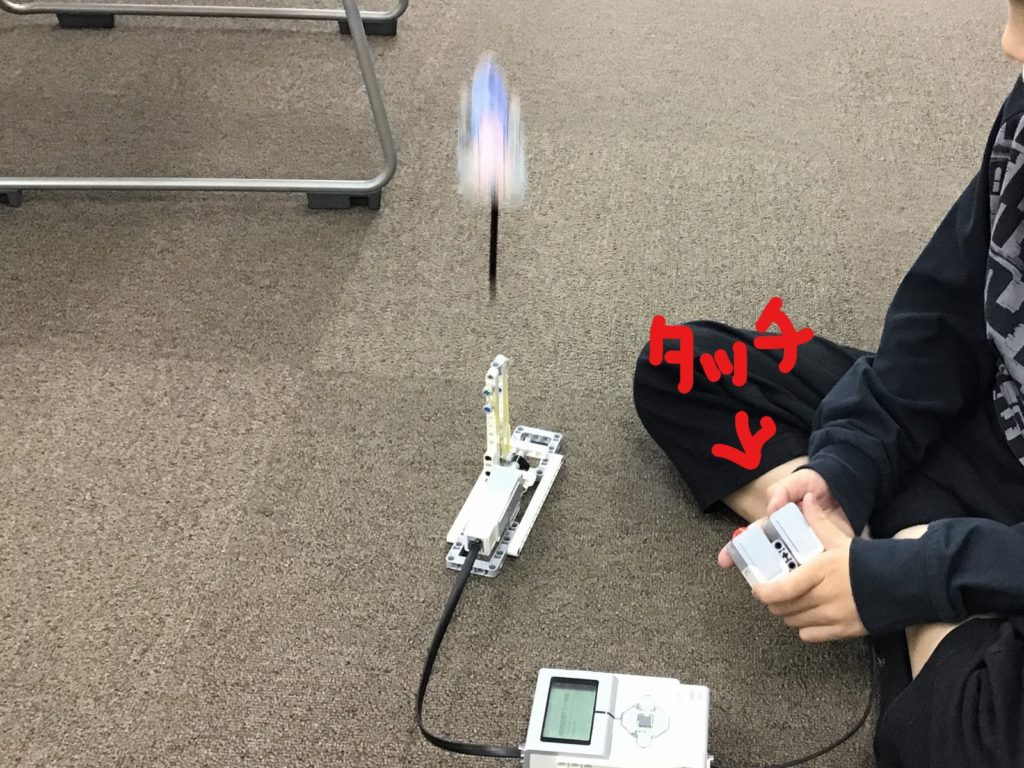
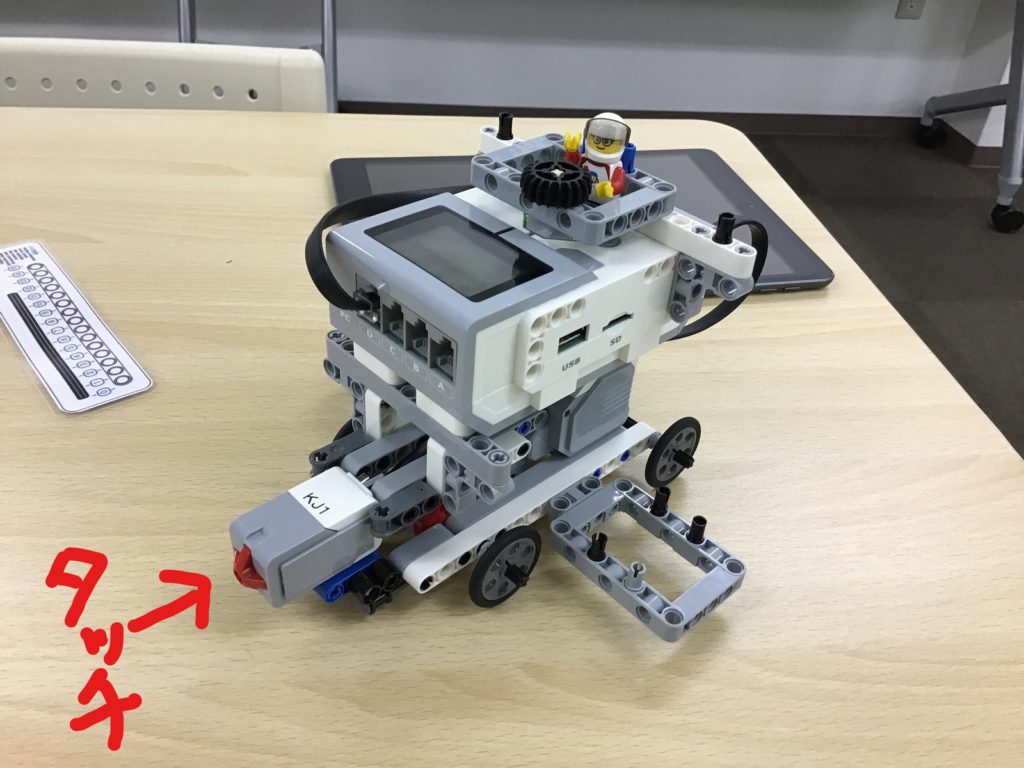
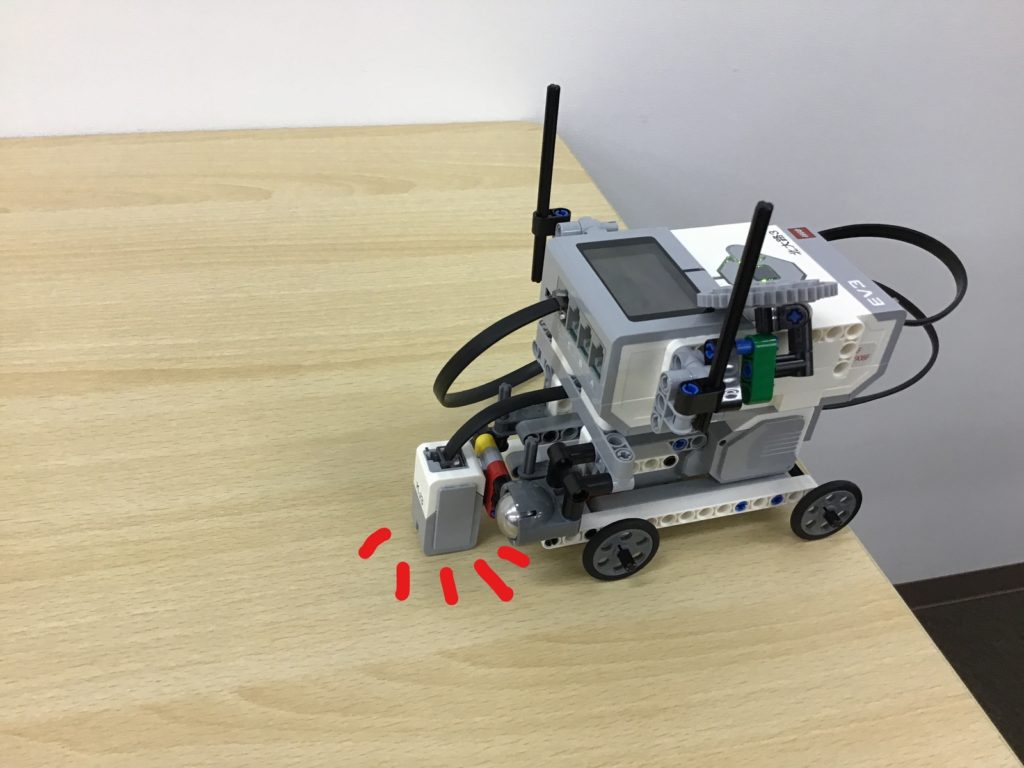
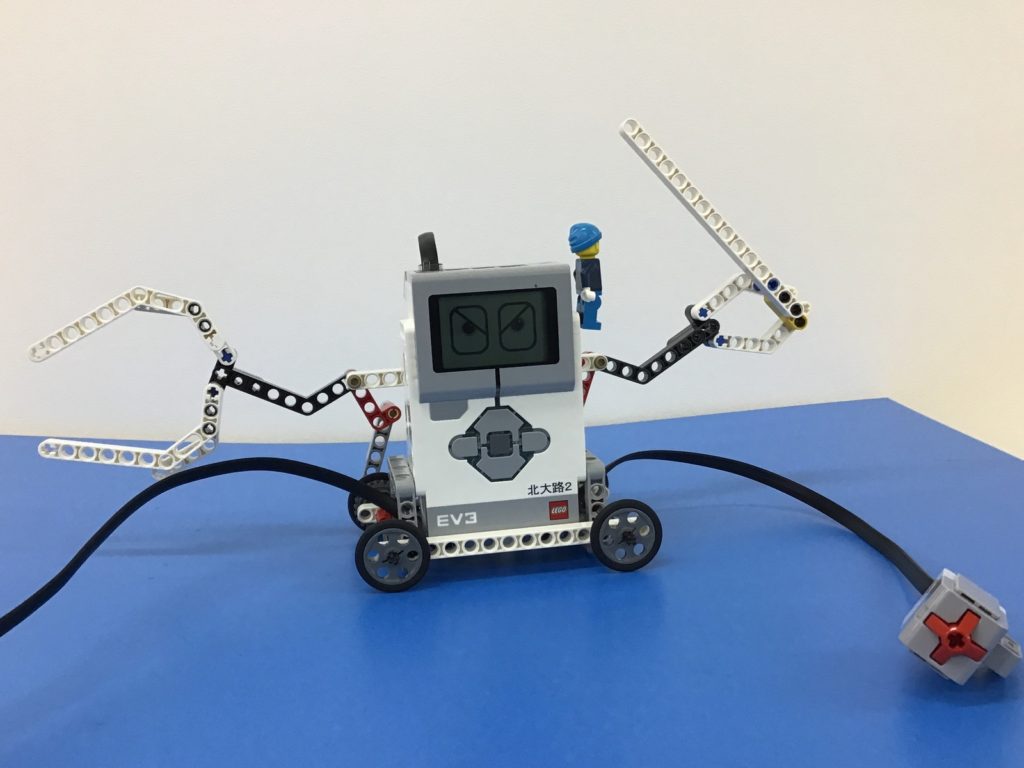
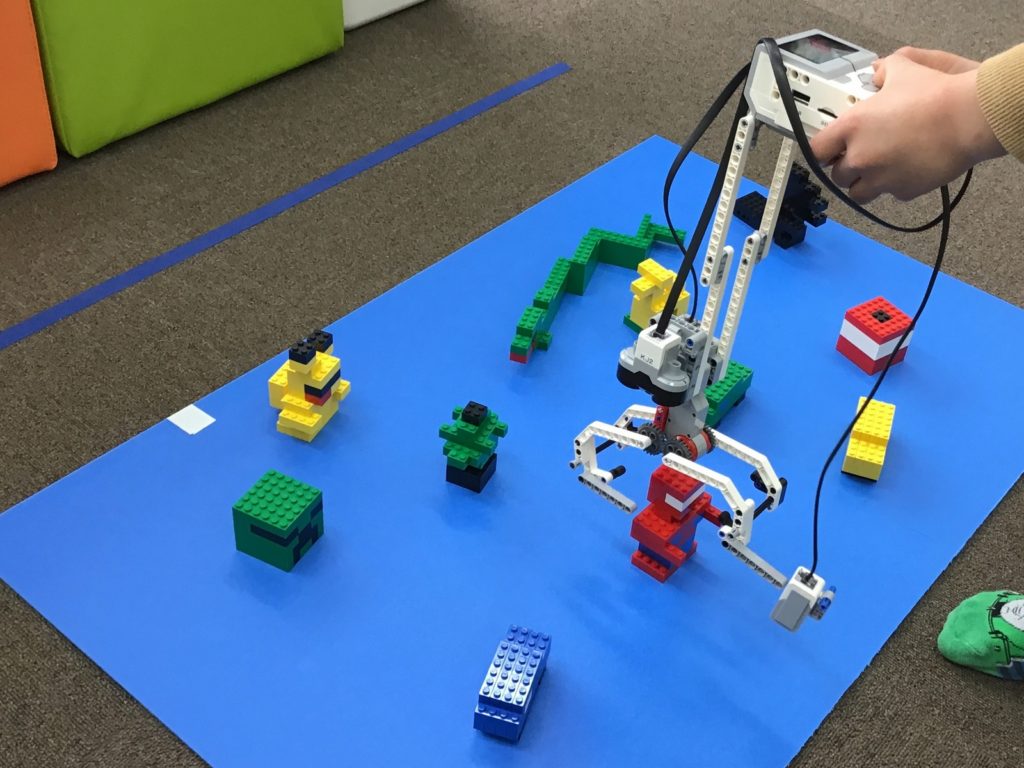
超音波センサーは距離を測れるセンサーで、 これをクレーンゲームのアームのようなロボットに、下向きに取り付けることで、床からの距離をきっかけにしてアームが動き、物がつかめる仕組みです。
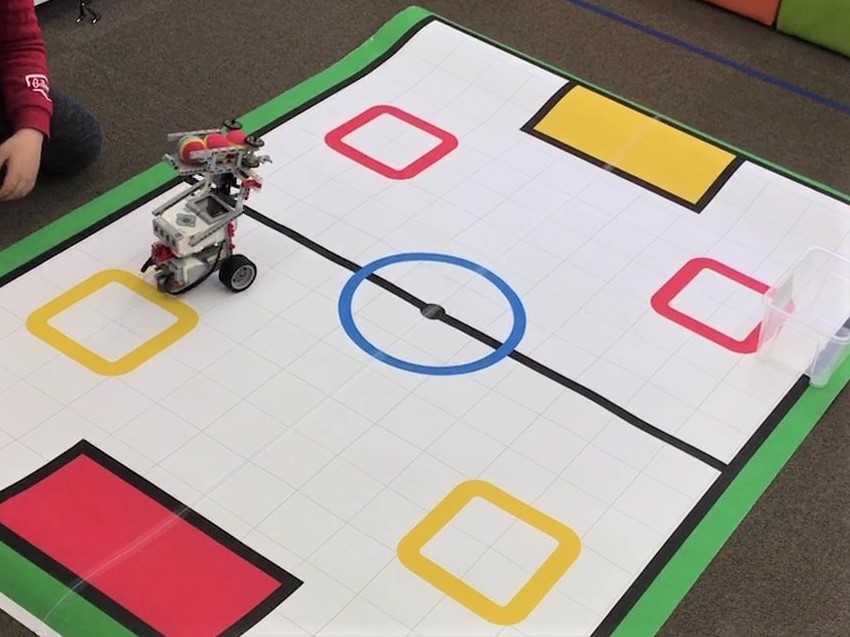
各々、アームの先を改造したりして、いろいろなもの(景品?)をつかむゲームに挑戦しました。
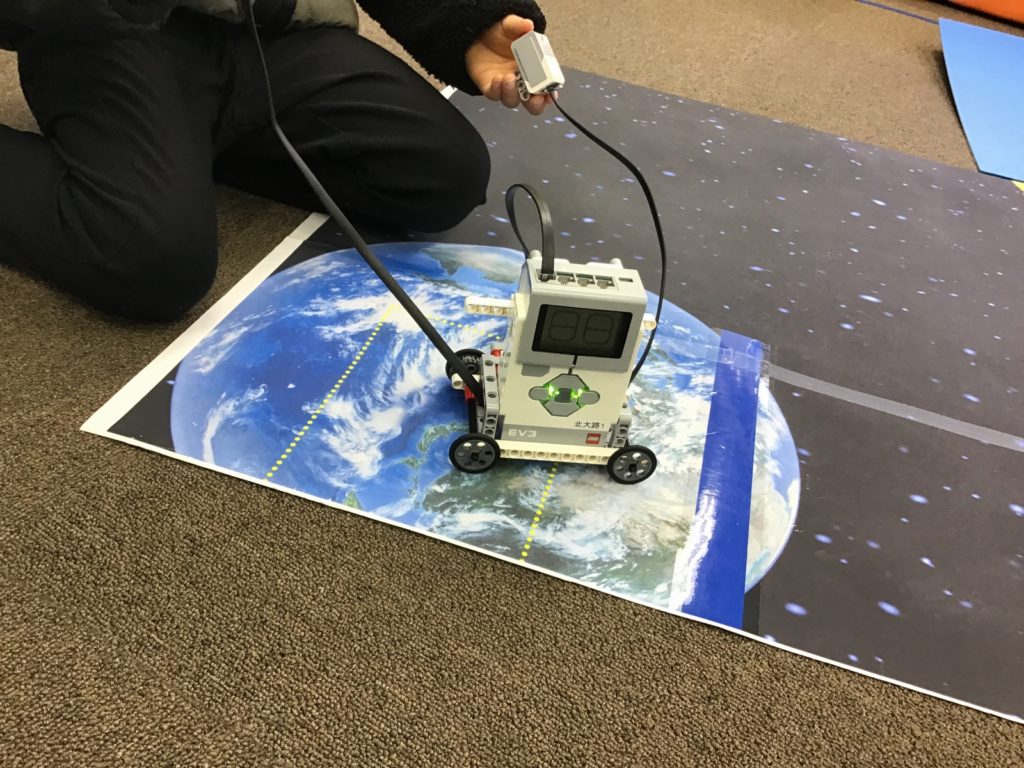
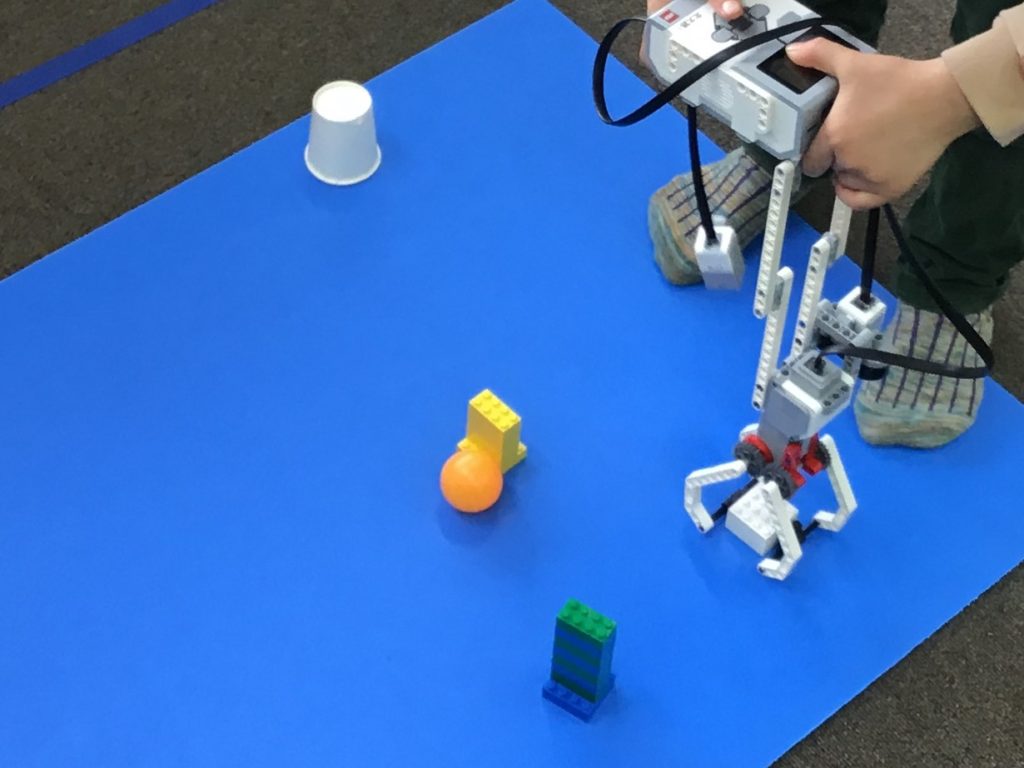
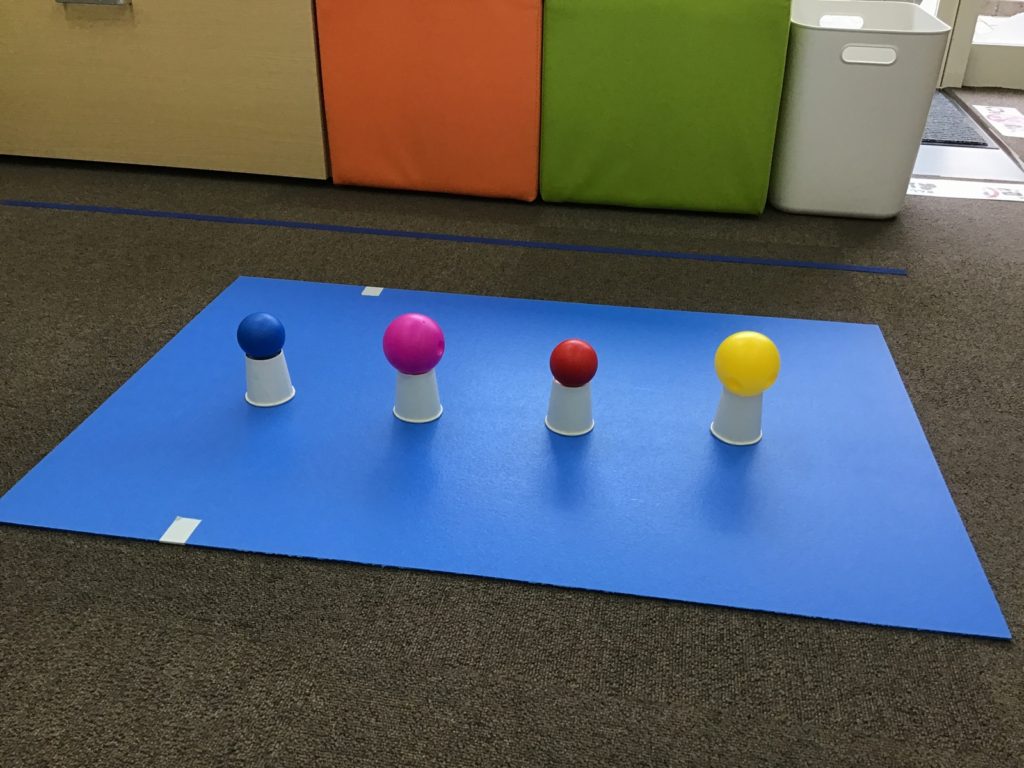
まずは第1ステージ【大きめのボール】
これは改造が無くてもつかめます。
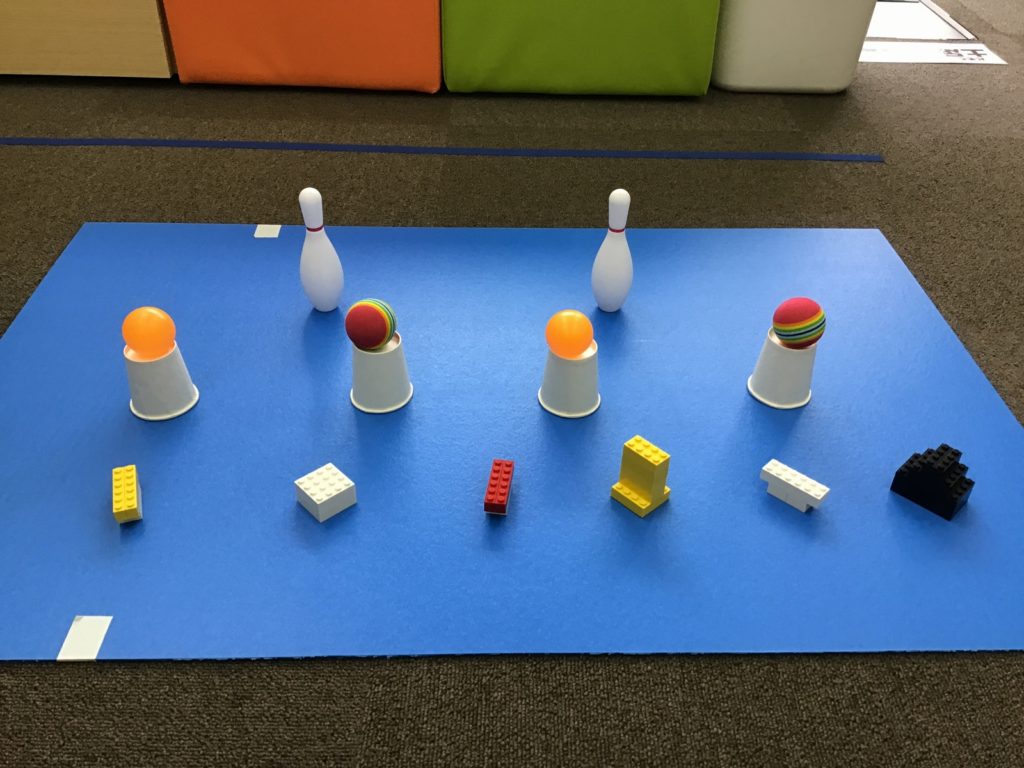
第2ステージは【小さいものや変わった形のもの】
頑張れば改造無しでもつかめますが、ちょっと難しいかな?
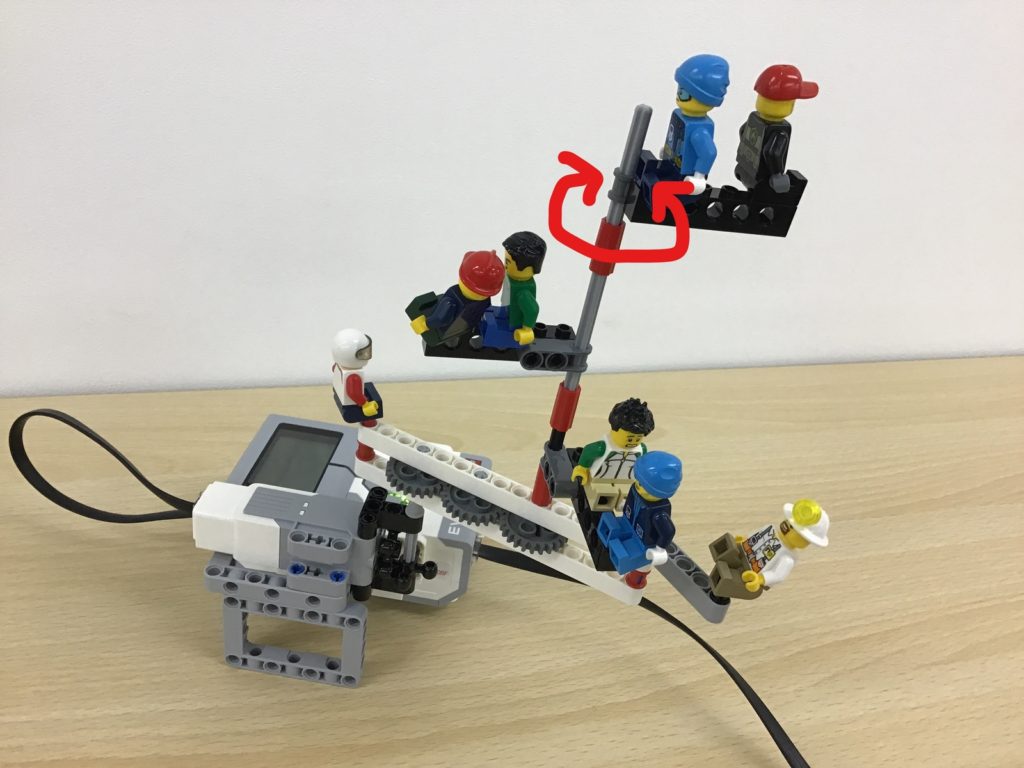
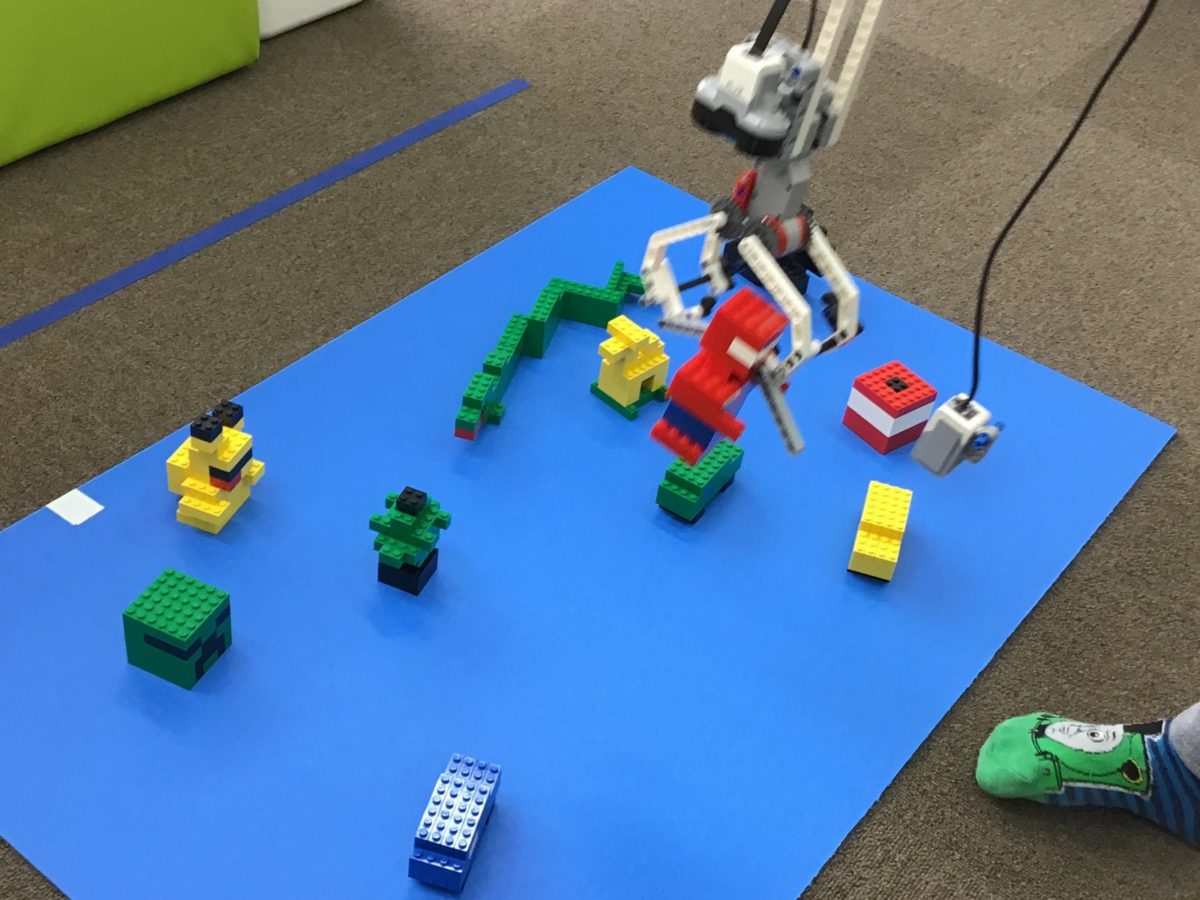
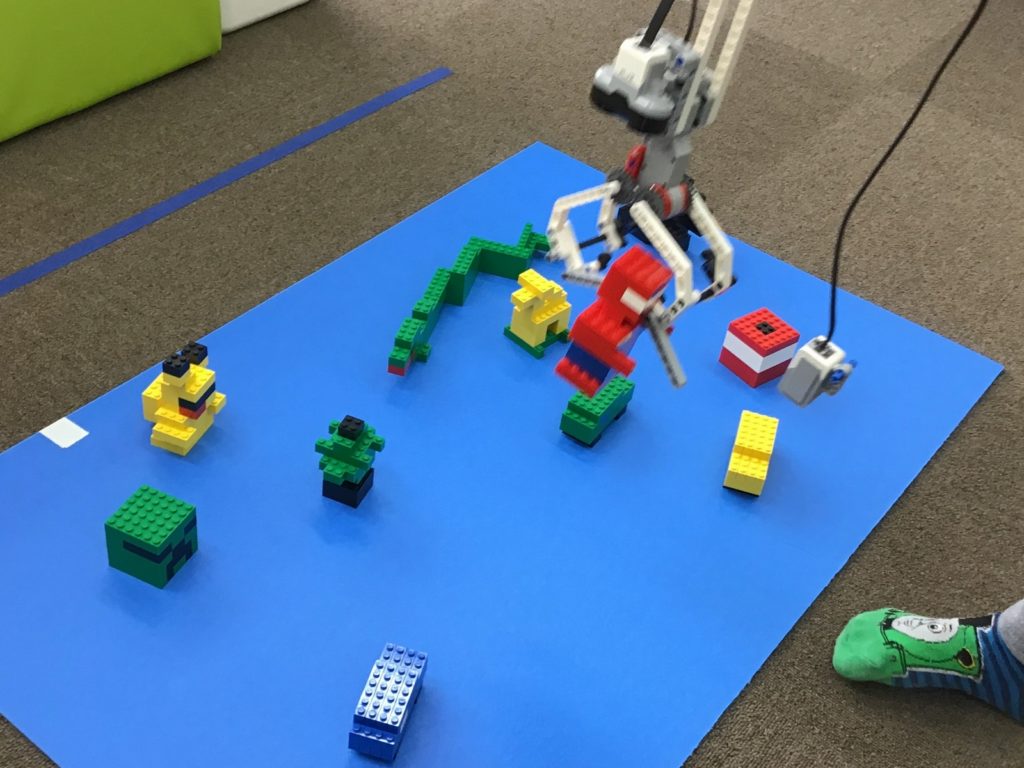
第3ステージ【キャラクターグッズ】
自分の知ってるキャラクターが景品になると、テンションが上がります!
と、ここで、景品人気ランキング!
第3位 あのアメコミのスーパーヒーロー。赤と青のコスチュームで、クモのように壁に貼り付いたり、クモの糸を出したり・・・
このキャラクターがすごく好きな子がいて、授業の初め悪かった機嫌が、この人形のおかげで直りました。

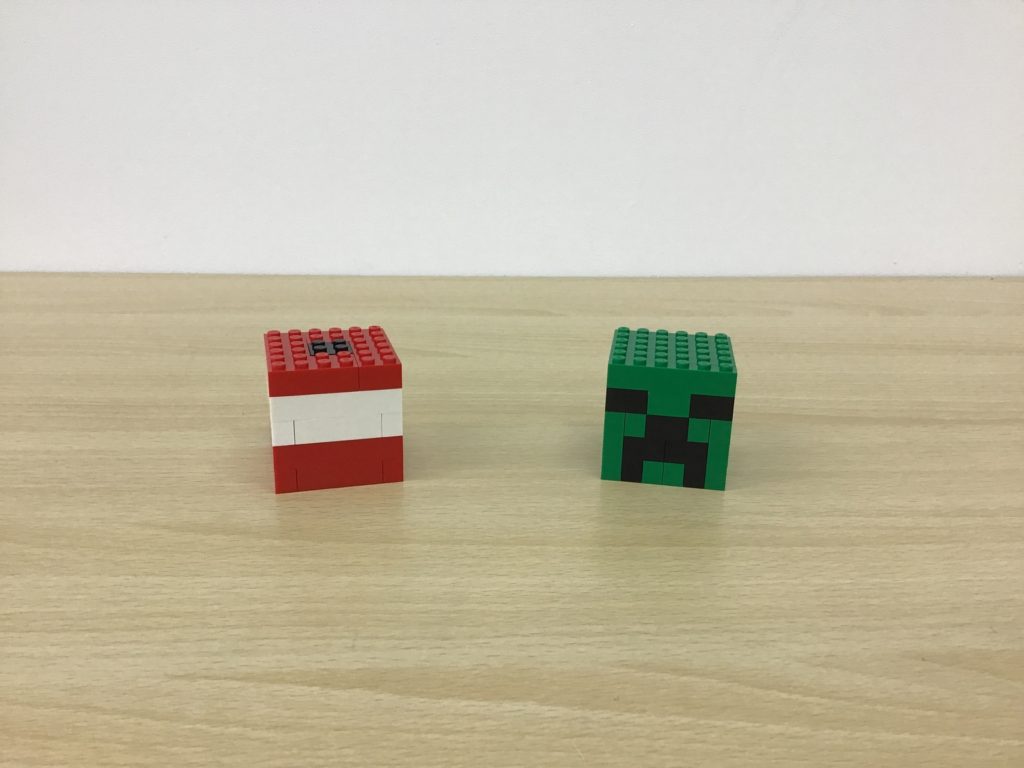
第2位 ゲームやアニメで有名なキャラクター達。特に、黄色いキャラクターは、先生の苦心の作。クオリティは低いのに、なぜか、誰がつかむか取り合いになるほど。
(黒い方は生徒の作品ですが、何というキャラクターかは不明。)

第1位 あの超有名ゲームのキャラクター。ゲームをやっている子と、YouTubeでゲーム実況を見ている子がいましたが、いずれにしても認知度がピカイチ!