子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
アドバンスト1クラスでは、ロボットの仕組み(からくり)について学んでいます。
カム機構、リンク機構、歯車・・・ビギナークラスやスタンダード1クラスから通ってくれているベテランの生徒たちには、今までにも学んできた内容です。逆に言うと、それだけ重要で、奥が深いとも。
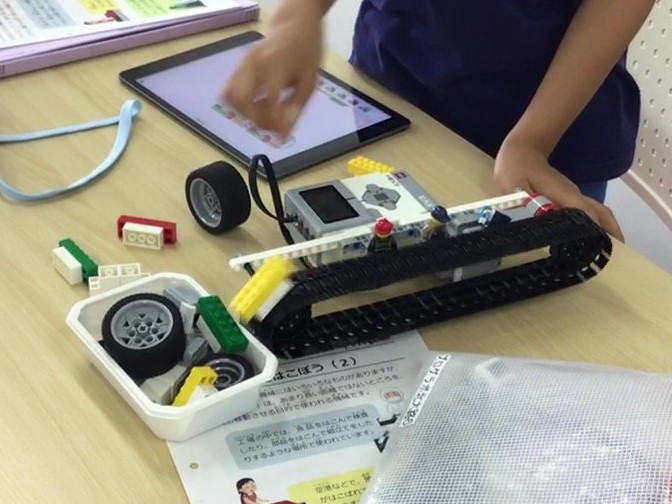
さて、今回はカム機構とリンク機構、一通り仕組みをやってみて体感した後は、【ミニからくり装置】を自由に作りました。
ボールが転がっていったり、複数の箇所がおもしろく動いたり・・・簡単そうに見えますが、やってみると意外と難しい!
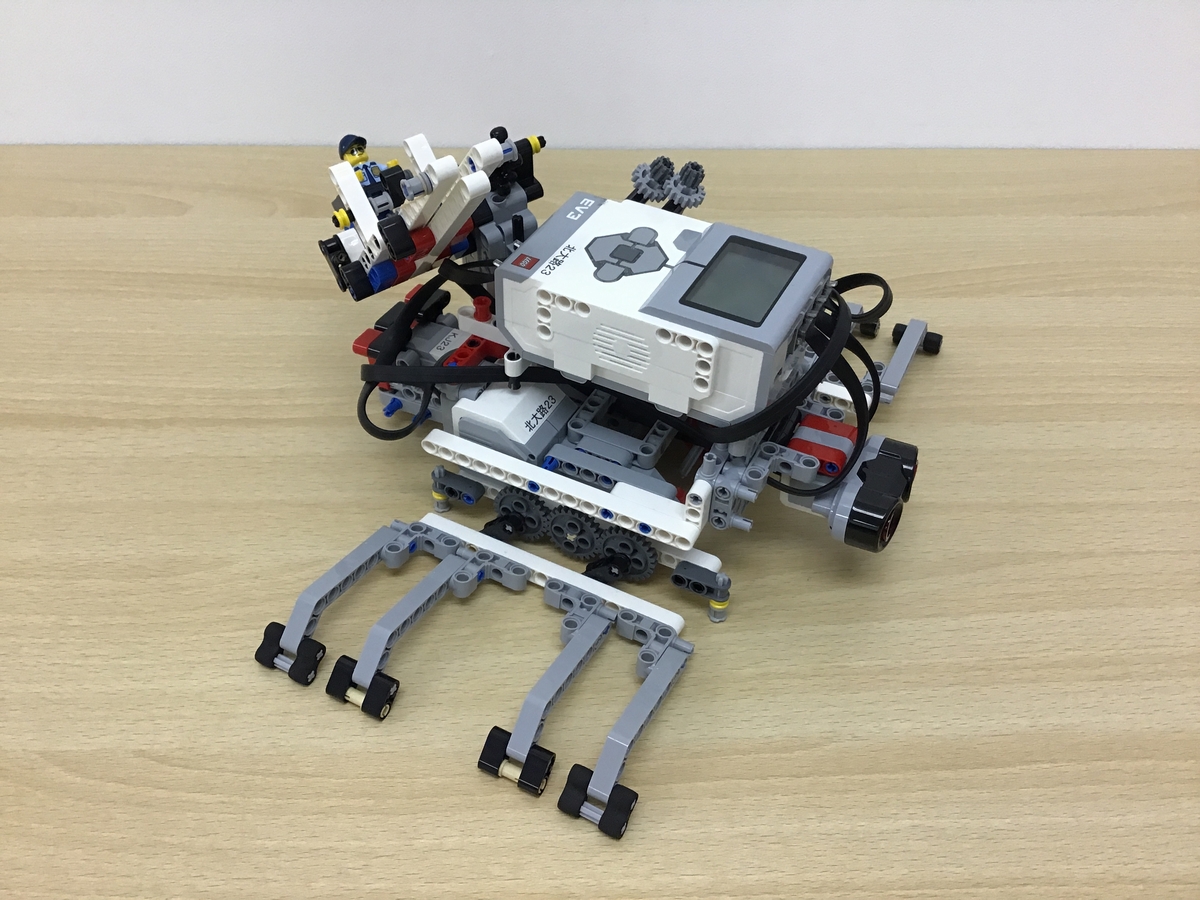
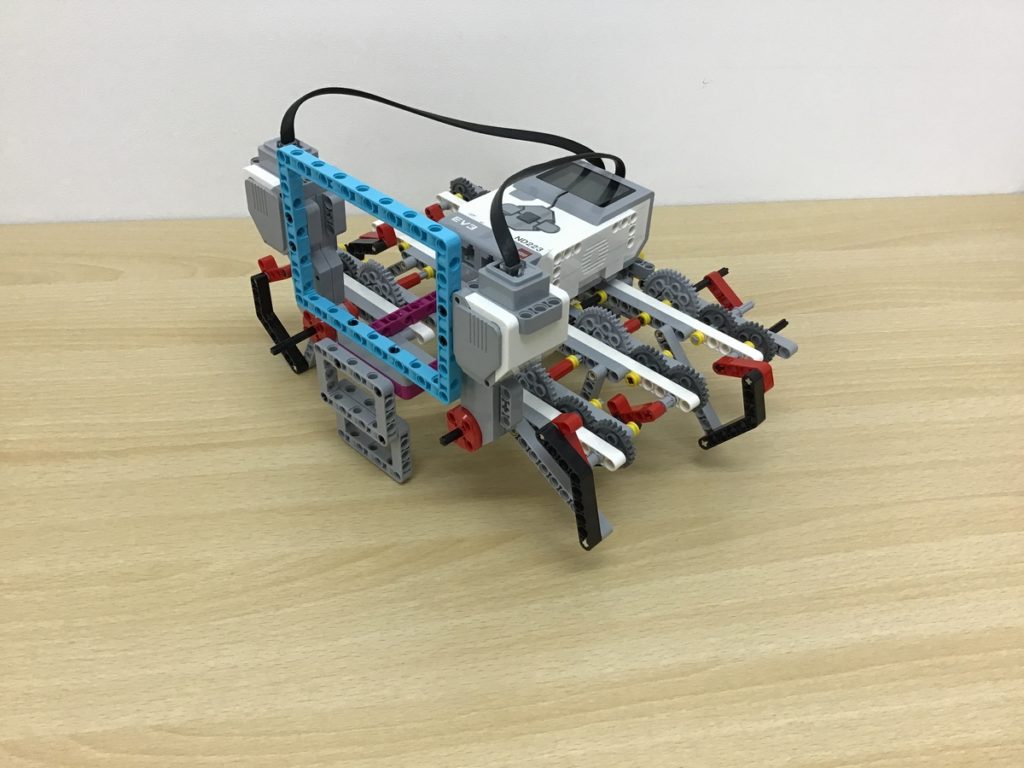
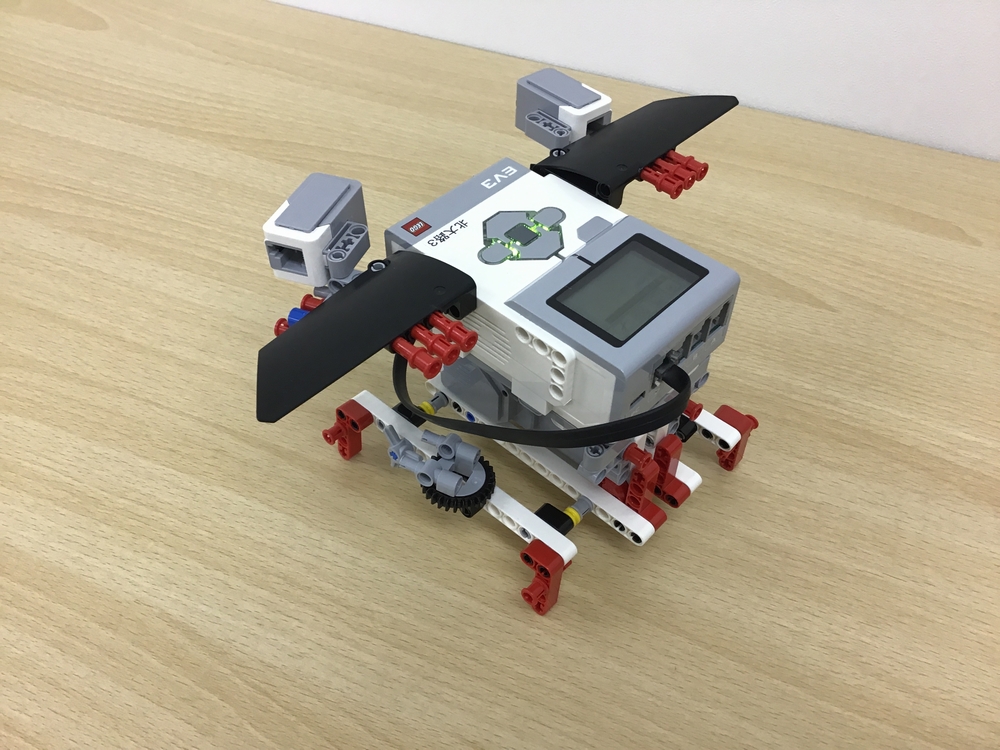
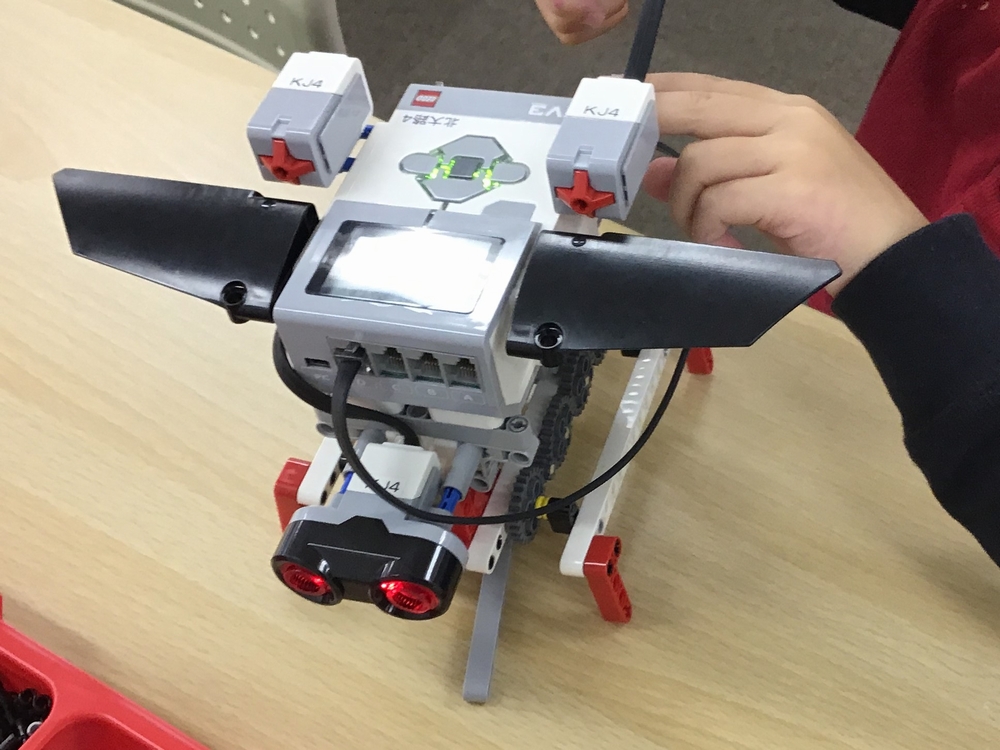
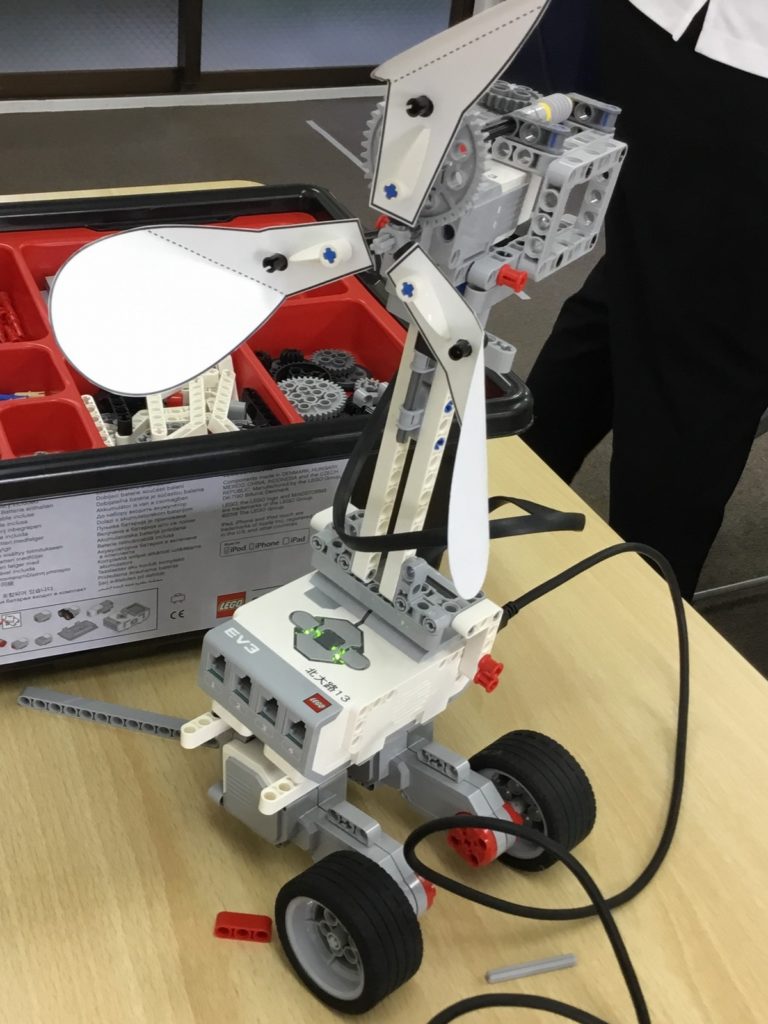
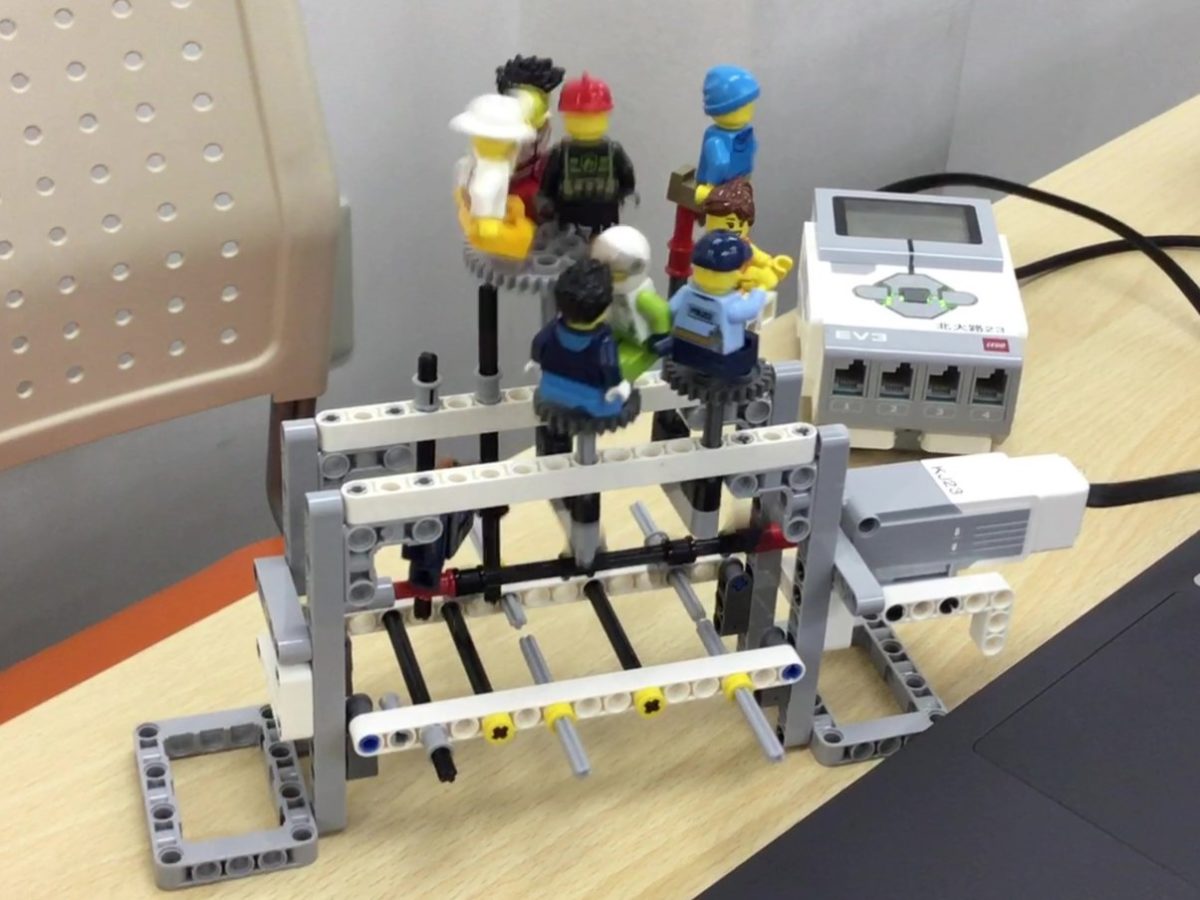
カム機構と歯車とゴムを使って、複雑に動く装置を作ってくれました。
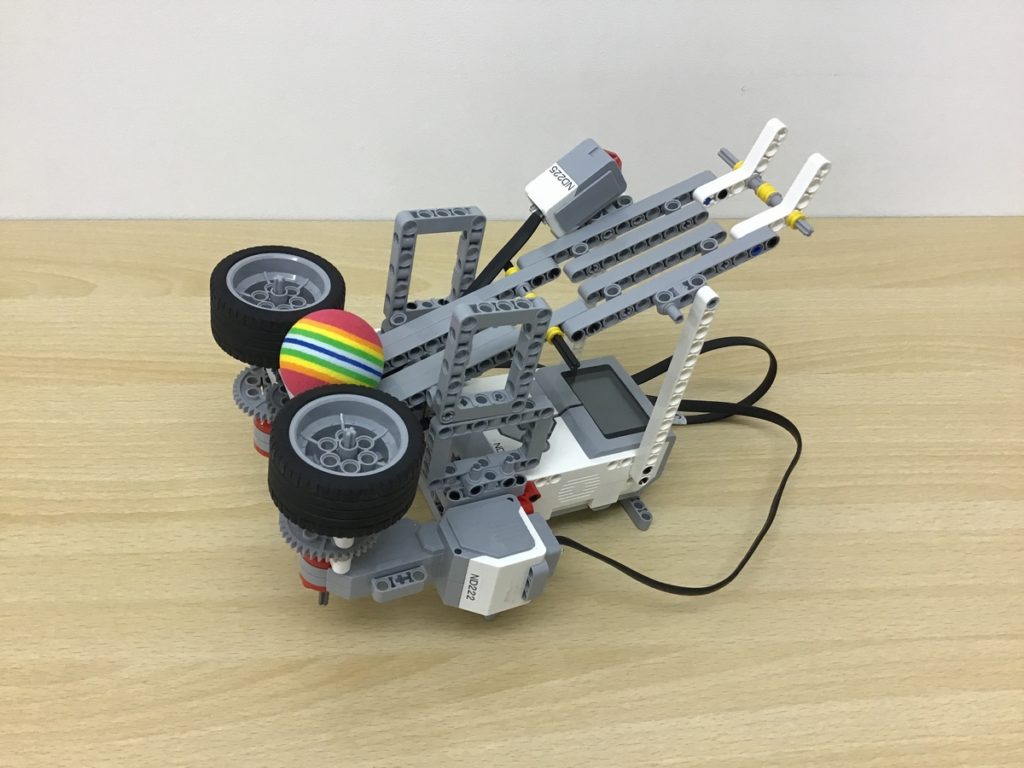
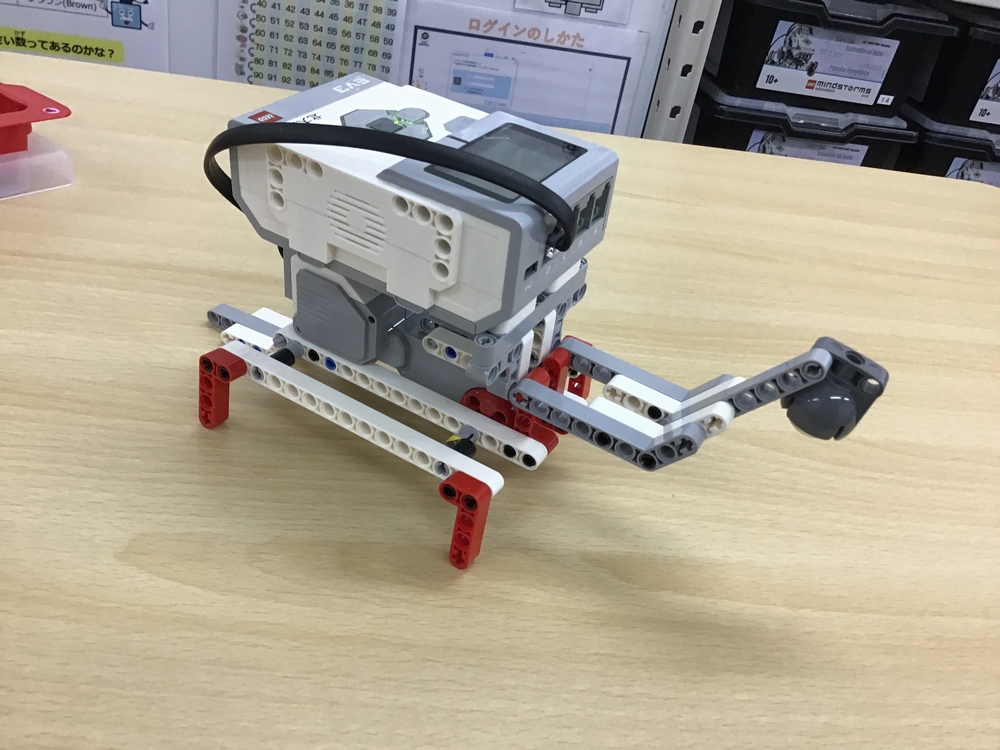
ボールが下の段に落ちて、上手くキャッチできると気持ちいい♪
2か所にボールの引っかかりポイントがあり、カム機構で上に押して超えていきます。
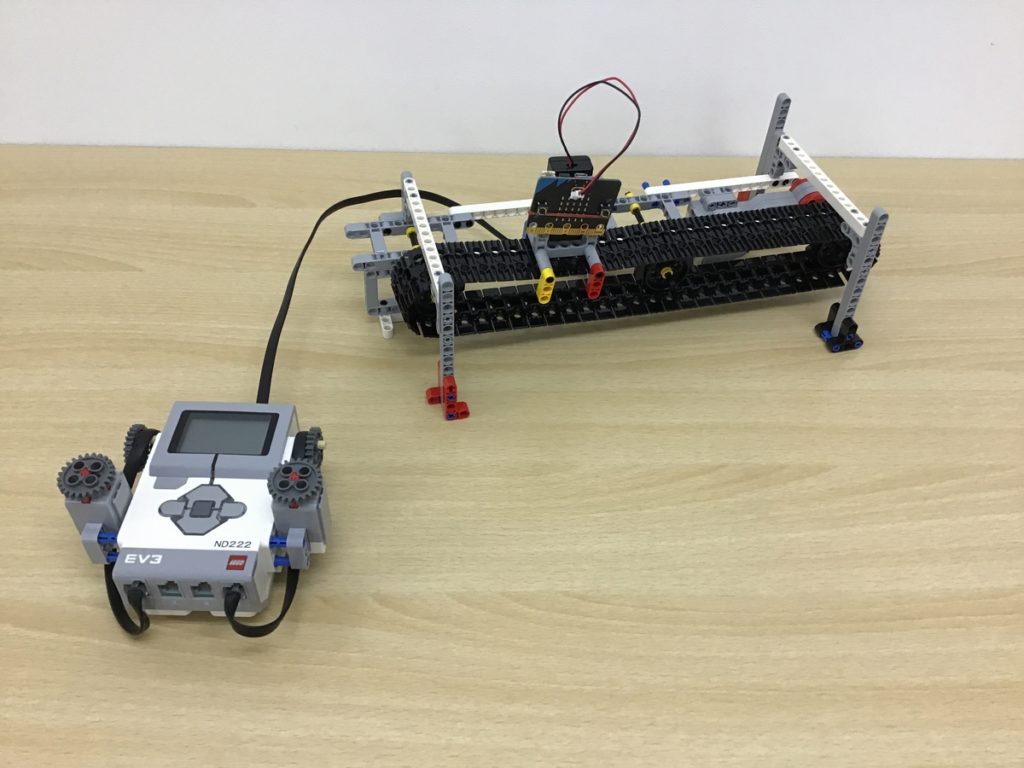
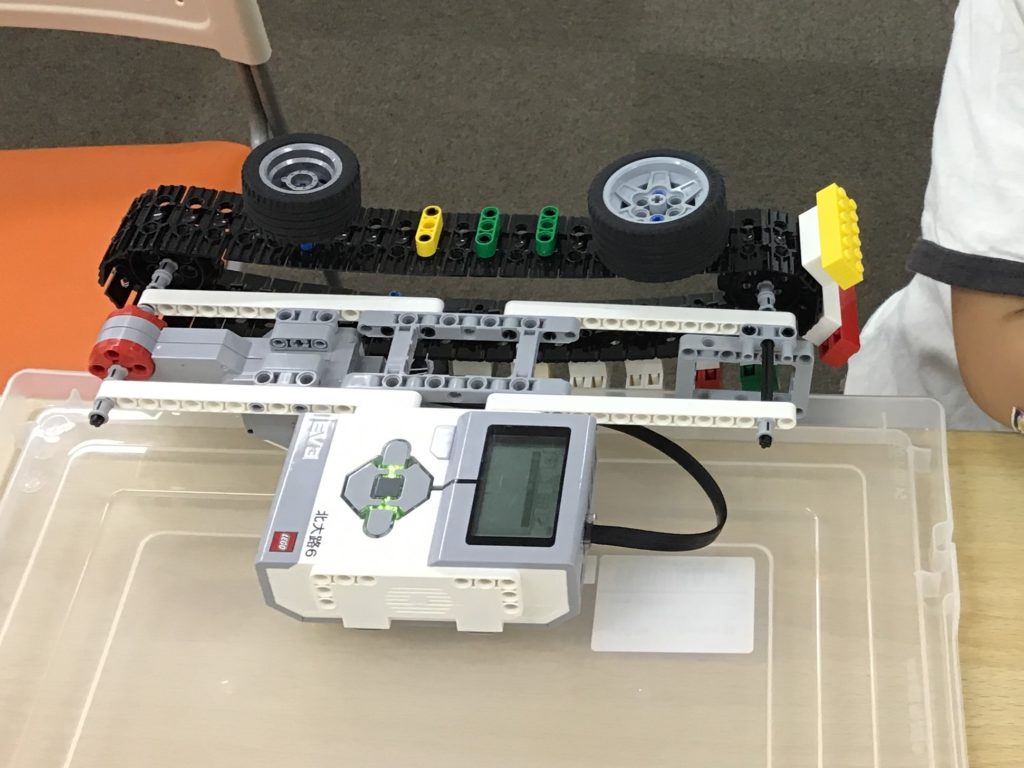
レールを曲げるのは、結構難易度高いです。
実は、先生の作品を完コピしたものですが、微妙な高さ調整などをしたおかげで、お手本よりも流れがスムーズになりました。