子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
スタンダード1クラスでは、11月・12月に「超音波センサー」を用いたロボットの制作とプログラミングをしたのに続き、2月・3月は「カラーセンサー」用いたロボットの制作とプログラミングに取り組んでいます。(ちなみに、1月はロボット競技をしました。)
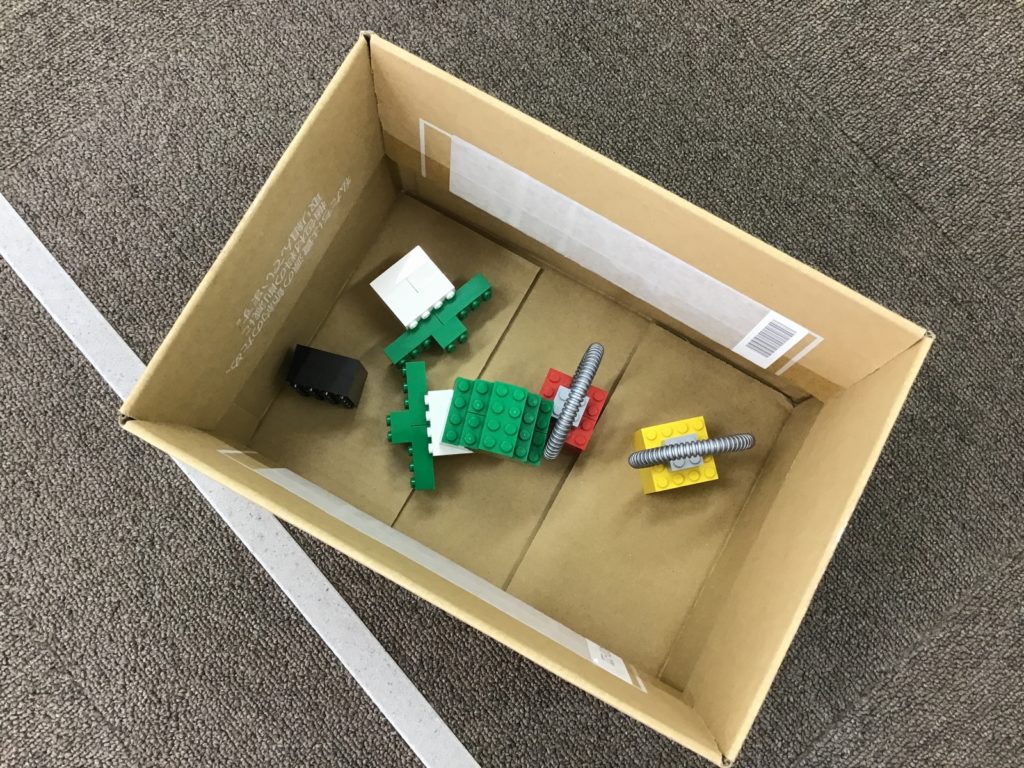
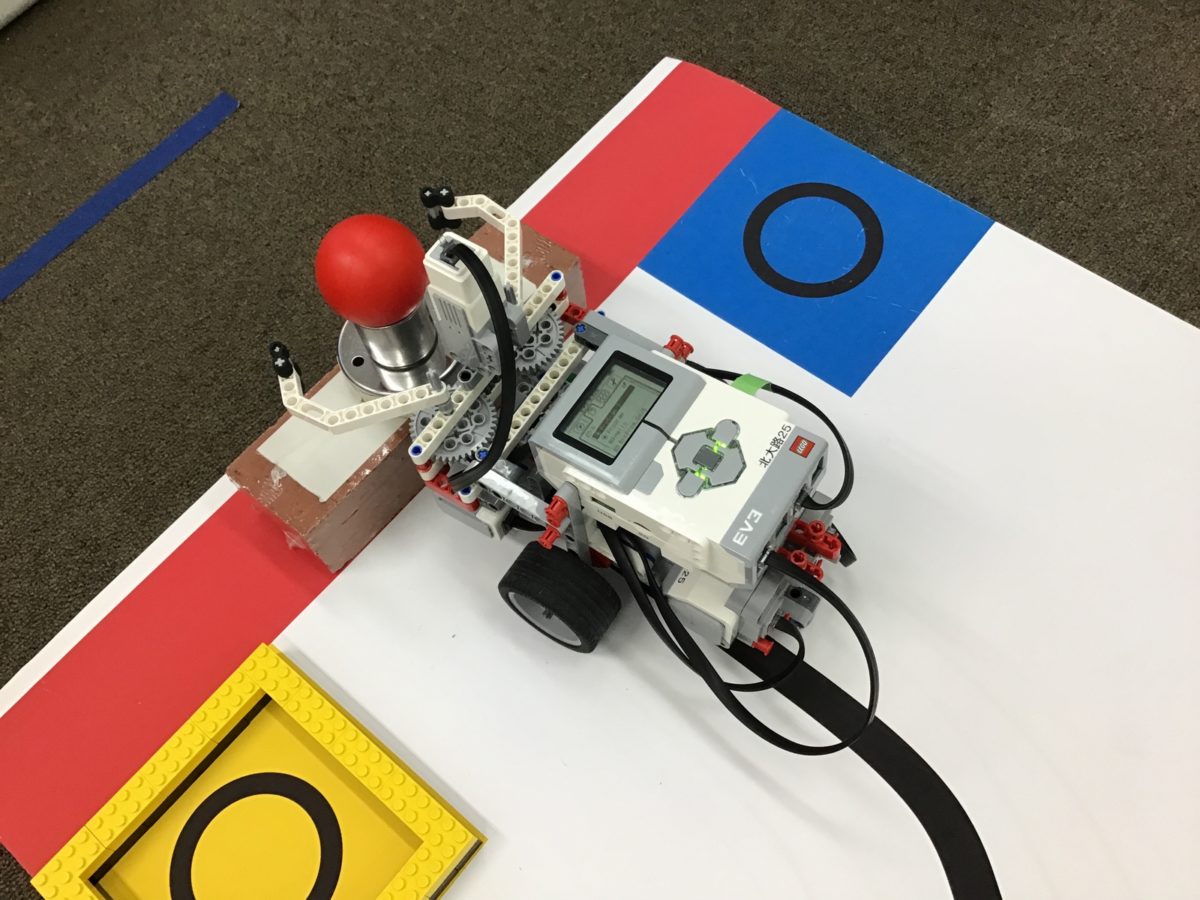
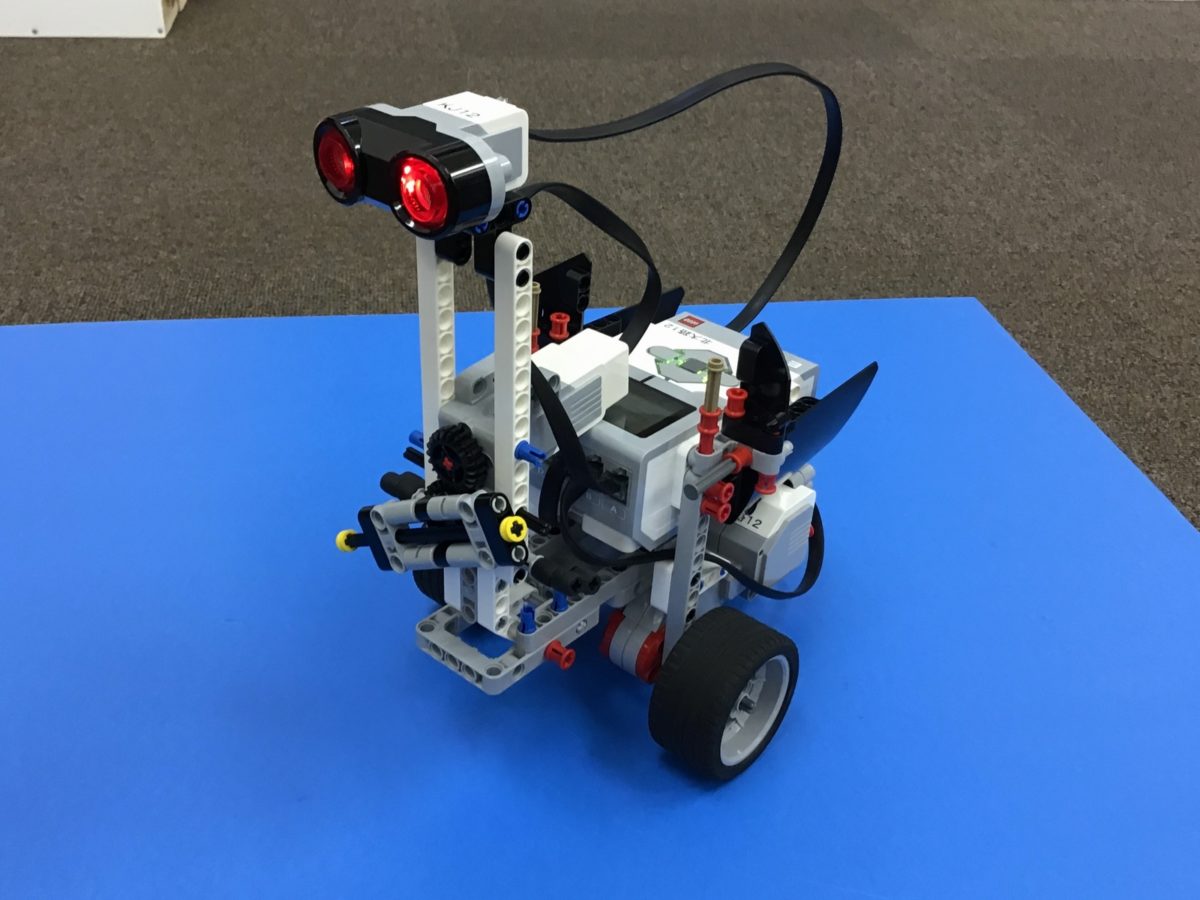
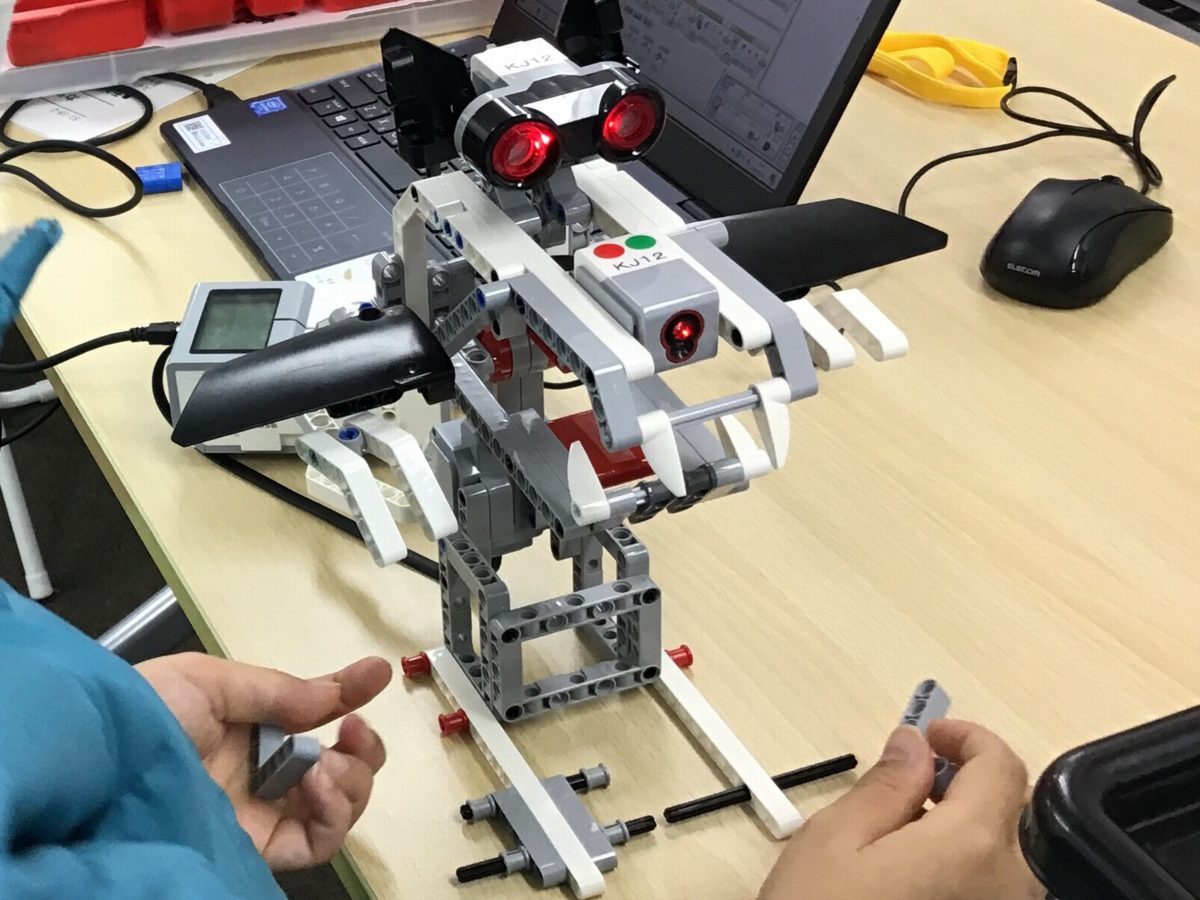
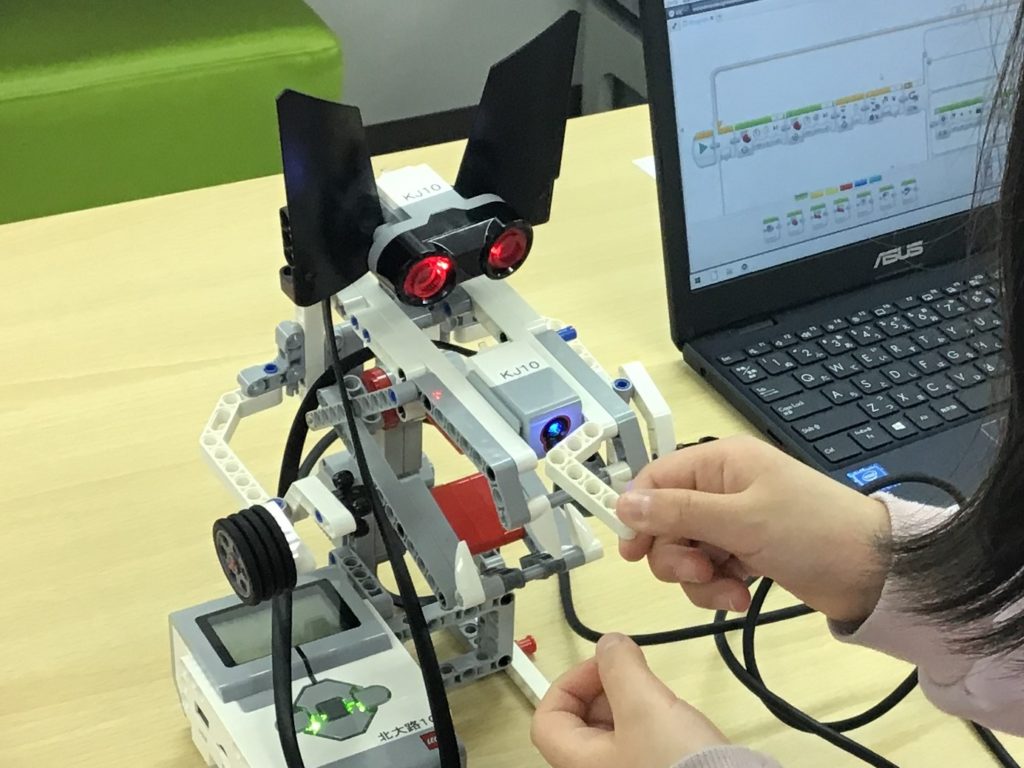
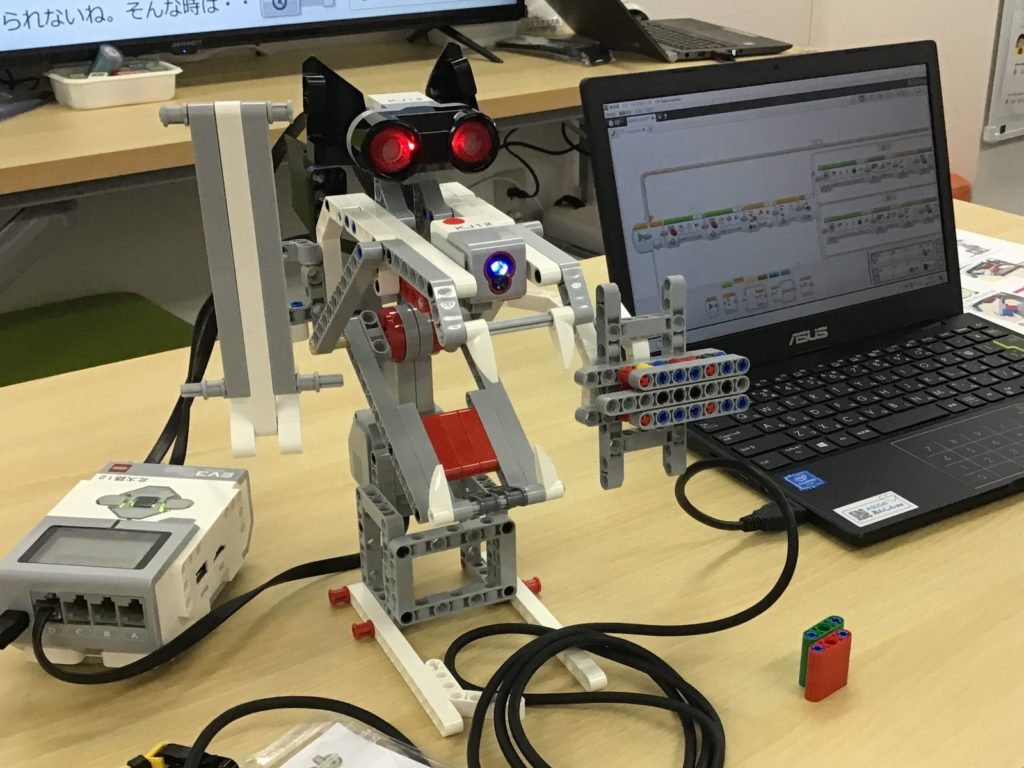
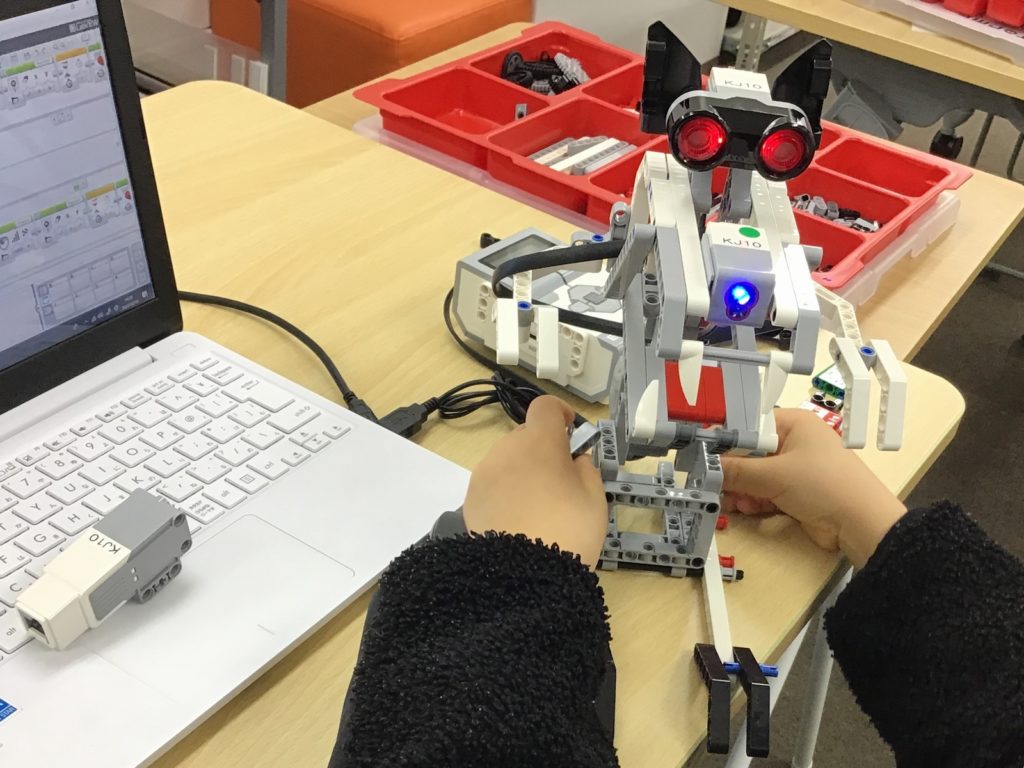
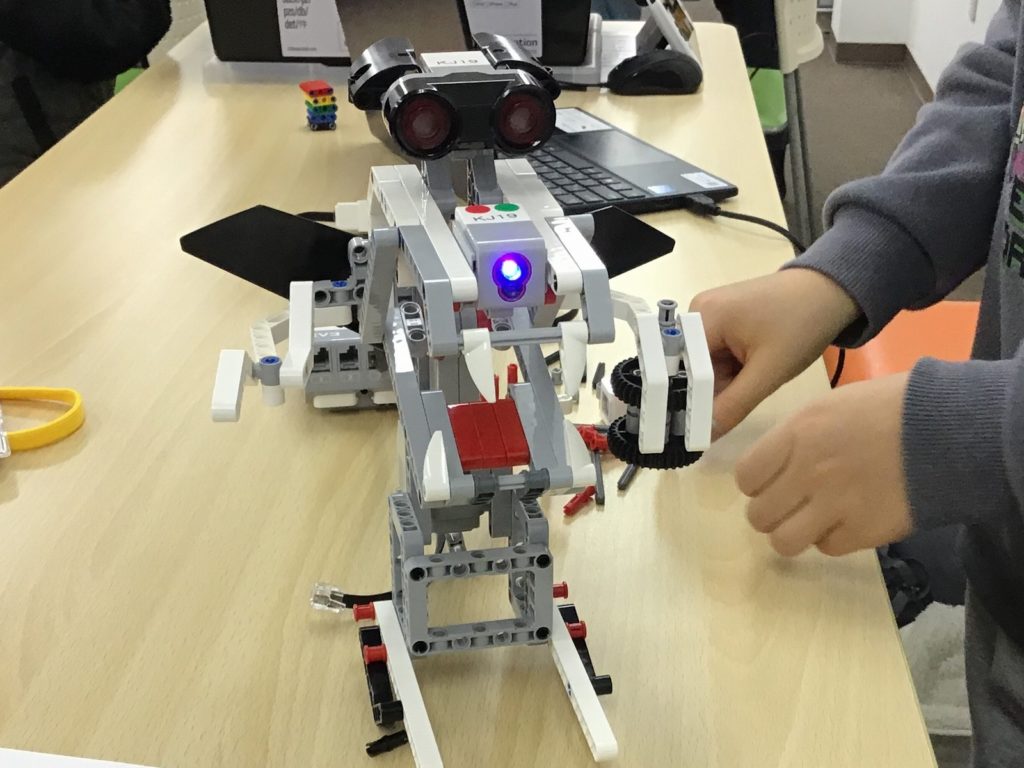
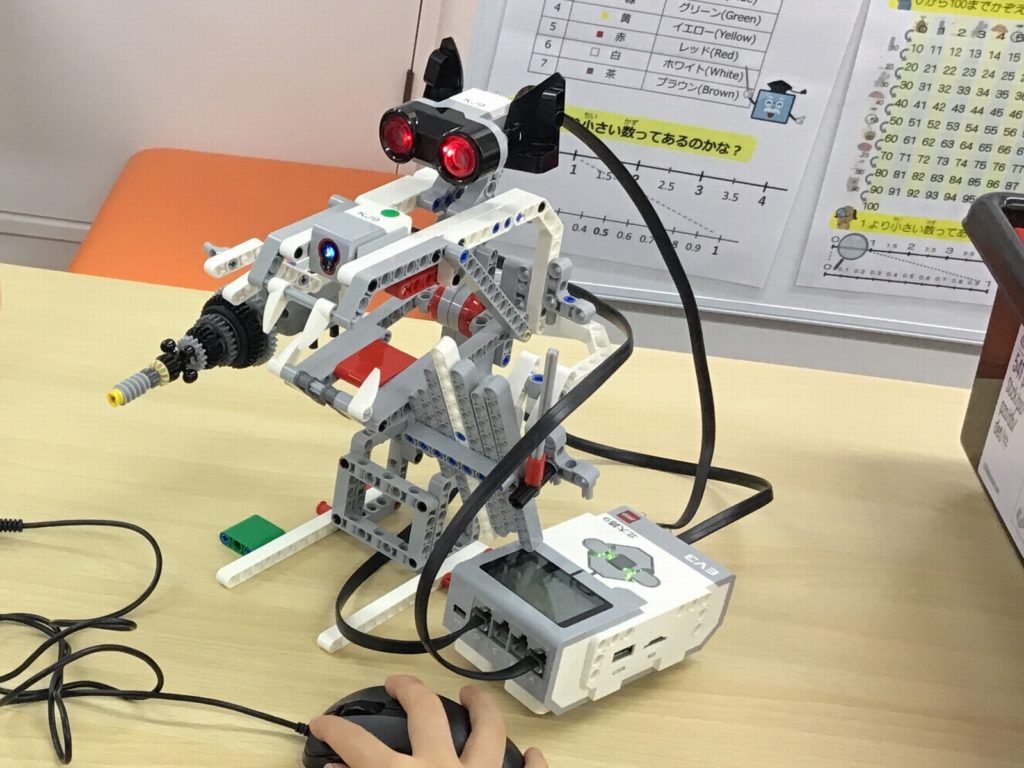
カラーセンサーは、その名の通り色を調べることができるセンサーで、このセンサーをモンスターロボットの鼻に見立てて、鼻にエサ=色付きのブロックを近づけると、色によってエサを食べたり、食べなかったりという動きをプログラミングします。
子ども達それぞれの設定で、「何色のエサは○○で、好きなエサだから食べる!」というように、色によって動きを変えていきます。
また、食べる・食べないだけでなく、声を出して喜んだり、画面に怒った顔を表示させたり・・・自分の設定をプログラミングで実現していきます。
そして、見た目も重要!ということで、剣や盾などのアイテムを持たせたり、羽を付けたり、しっぽを付けたり、ドリルを回したりと、最後にたくさん改造して完成です。



このモンスターロボットは、組み立てした後、翌週にプログラムして完成させるので、棚の上に並べて置いていたのですが、その姿にビギナークラスの下の学年の子たちはもちろん、スタンダード2クラスなど上の学年の子たちも興味津々です。
「去年作ったモンスターだよね?」
と、続けて通っていてモンスターを作ったことがある生徒は、自分が何色を何のエサにしたか思い出してみたり、
「僕らはこのロボットは作らないの?」
と、スタンダード1クラスを受講していない生徒は、ちょっと気になっている様子を見せたり、、、
人気者のモンスターロボットでした。