子ども向けロボットプログラミング教室「プログラボ」ブログ担当です。
4月から3月までの1年間が基本のスケジュールとなるプログラボ、多くの教室で今年度の授業が終了し、今週は来年度の準備などをしています。
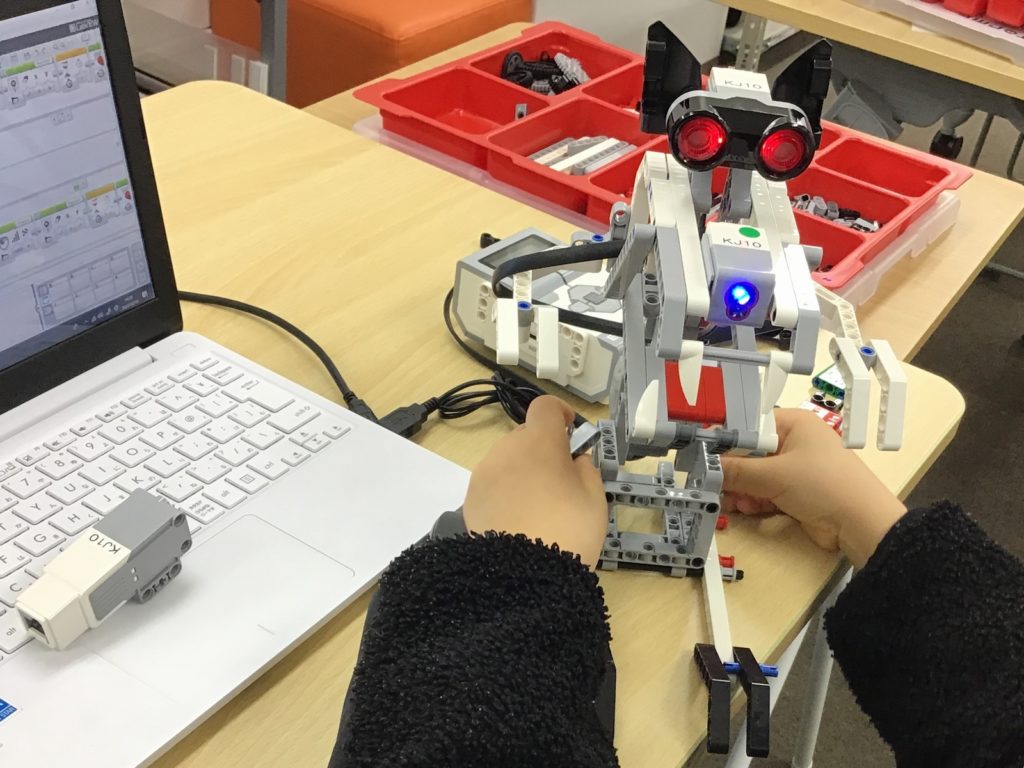
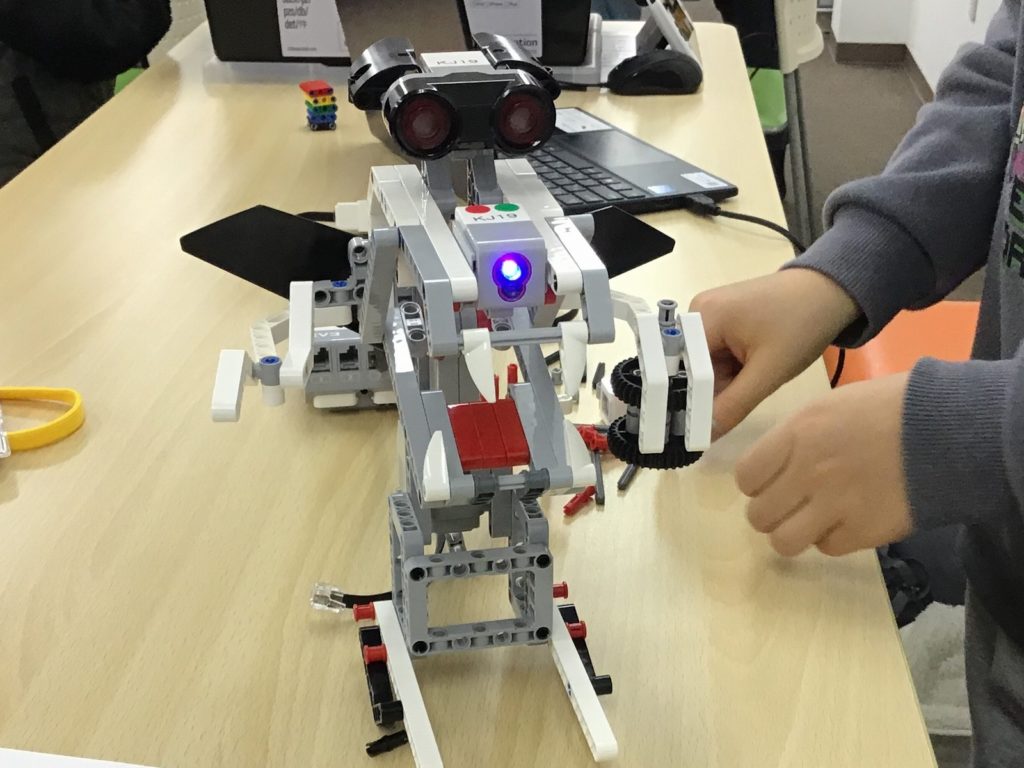
とある教室では、来年度のロボット競技についての研究をしています。
普段は子どもたちにアドバイスをする側の先生たちが、生徒役(と先生役)になって、【WROミドル競技】の小学生部門のルールで実際にロボット競技に取り組んでいました。
実はこの競技、全国大会も行われます。
ただ、こちらの教室ではアドバンスト1コースの子どもたちが、大会に出る人も出ない人も授業内でこの競技に挑戦する予定です。
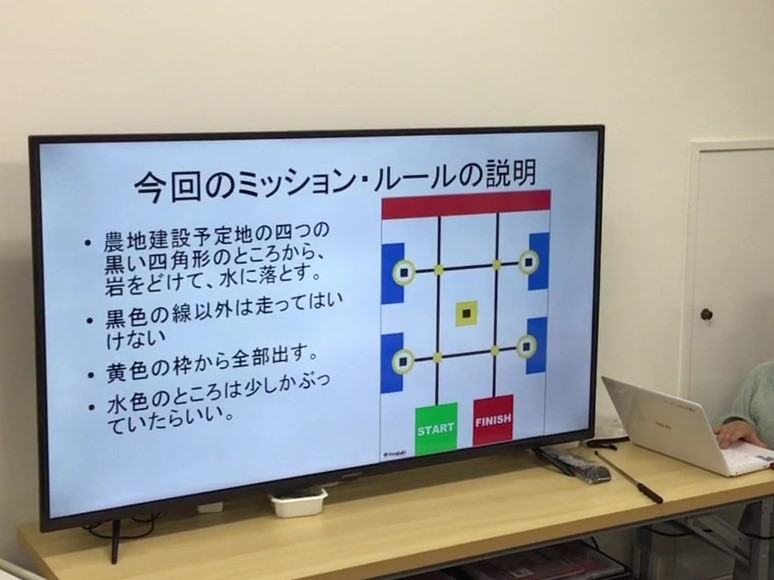
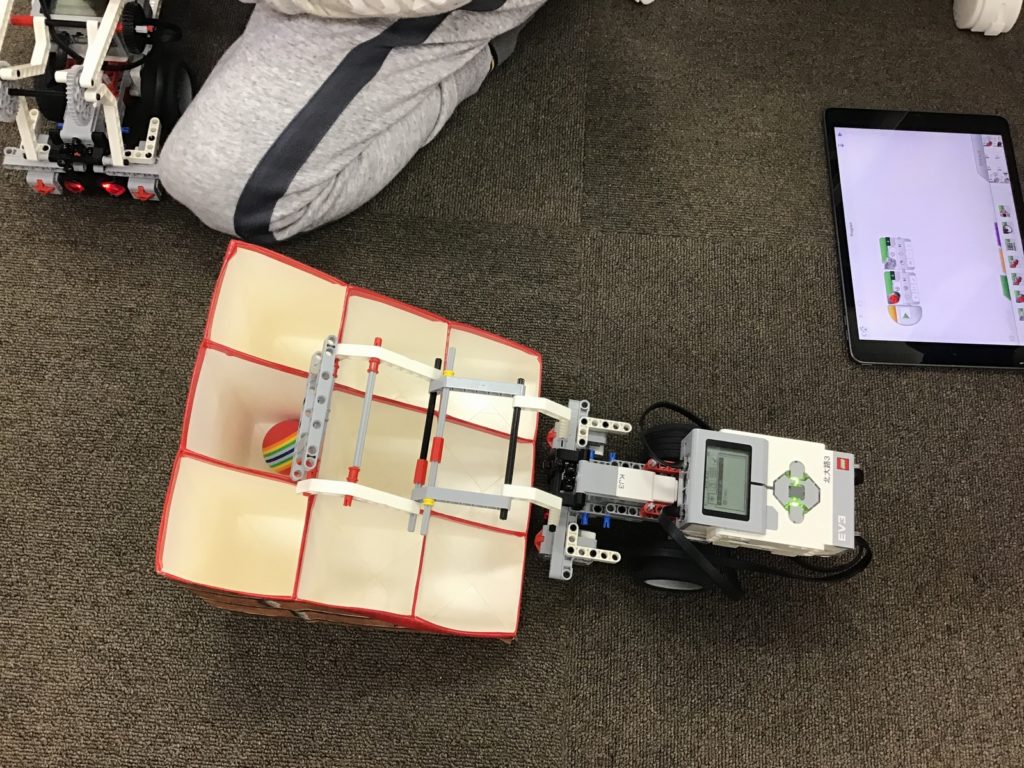
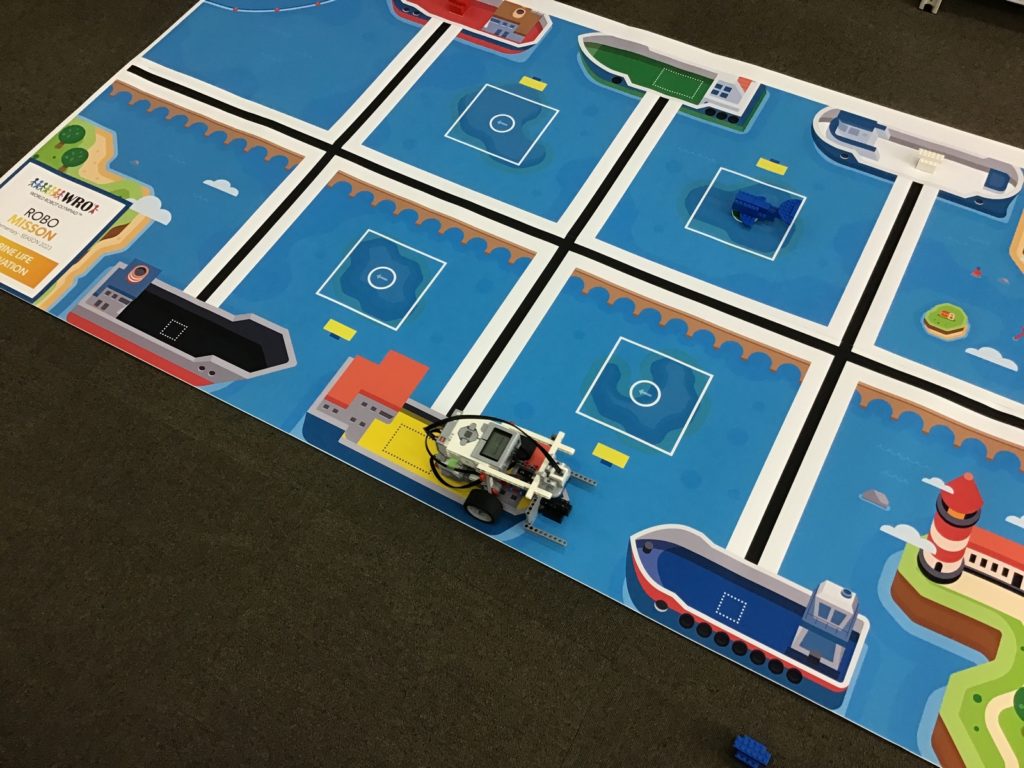
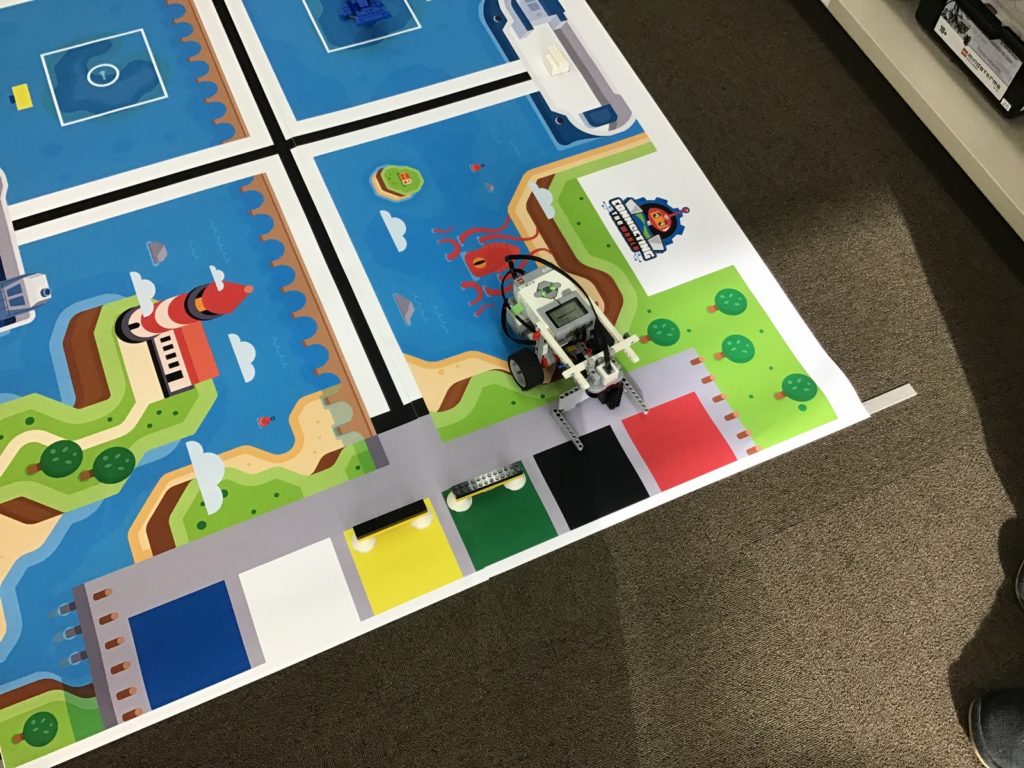
テーマは『海洋生物の保護』です。船から出た廃棄物(ブロック)を船と同じ色のリサイクルエリアに運ぶのと、サンゴ礁の浅瀬に迷い込んだクジラを救出して、観察エリアまで移動させるのが主なミッションです。
なお、廃棄物とクジラの位置はそれぞれ4か所から抽選で決まるので、どこにあるかは事前には分かりません。つまり、どこにあってもクリアできるようにプログラミングしておく必要があります。

どうやって廃棄物を運ぶか、どうやって廃棄物のある船を探すか、どこを通って移動するか。。。ルールを読んで作戦を立てます。
例えば、船の廃棄物を探しに行く際の順番をよく考えないと、タイムロスになってしまいます。実際にやってみると、考えた順番と抽選結果がうまく合うとタイムがすごく早くなり、そういう意味で、運の要素も多分にありそうだということに気付いたり・・・
また、基本的には子どもが自分たちで考えて解決するのですが、子どもたちならどんな作戦を考えそうで、どこにつまずきそうか、その場合どんなアドバイスができるのか、というようなことをシミュレーションしながら取り組みました。(ですので、あえて子ども目線のあまりスムーズではない作戦もやってみました。)

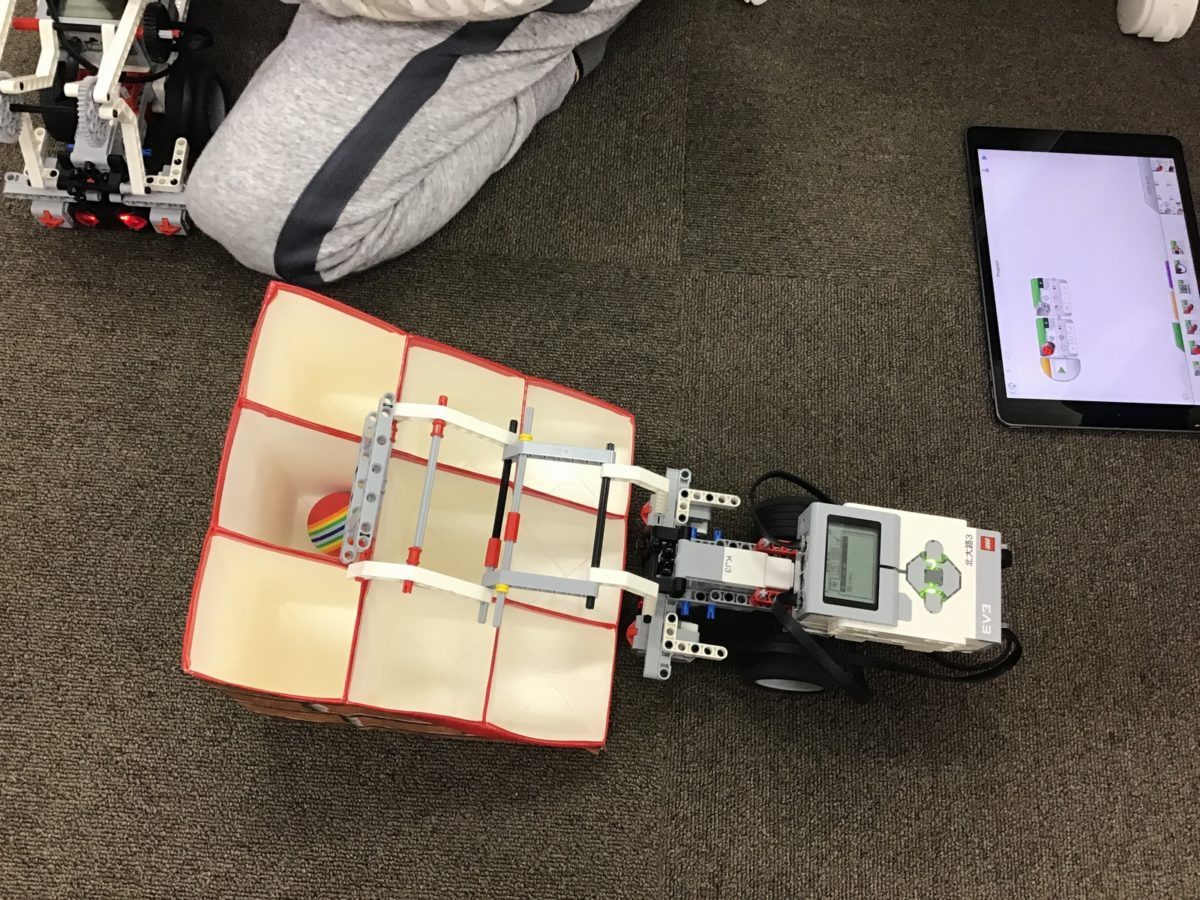
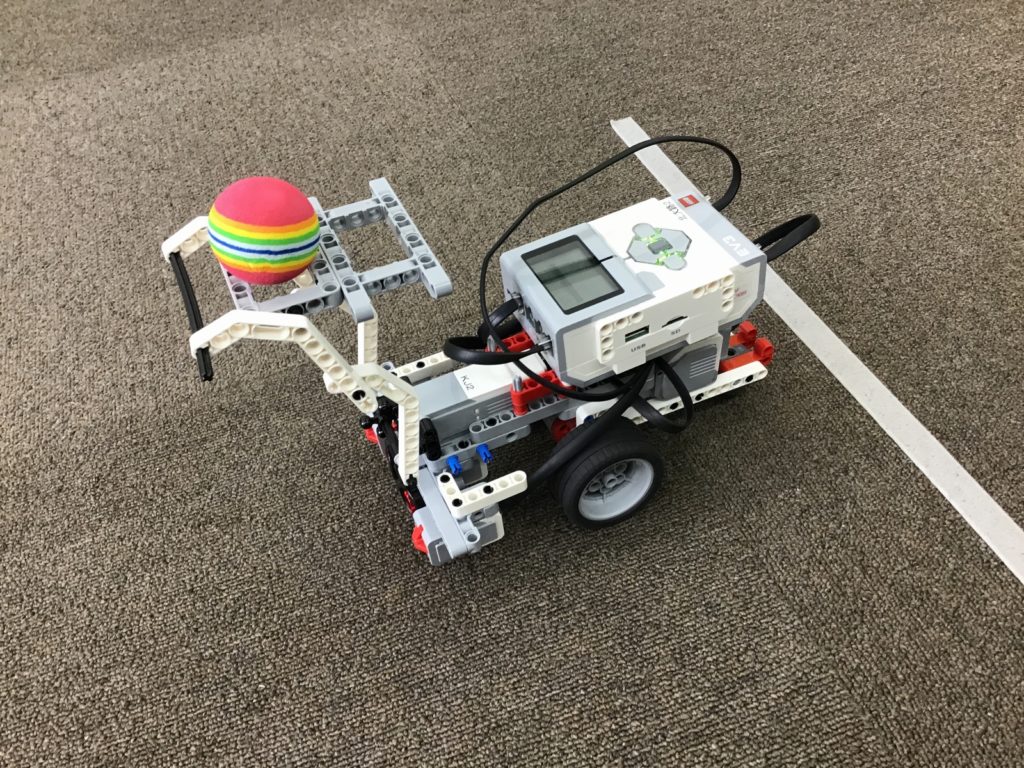
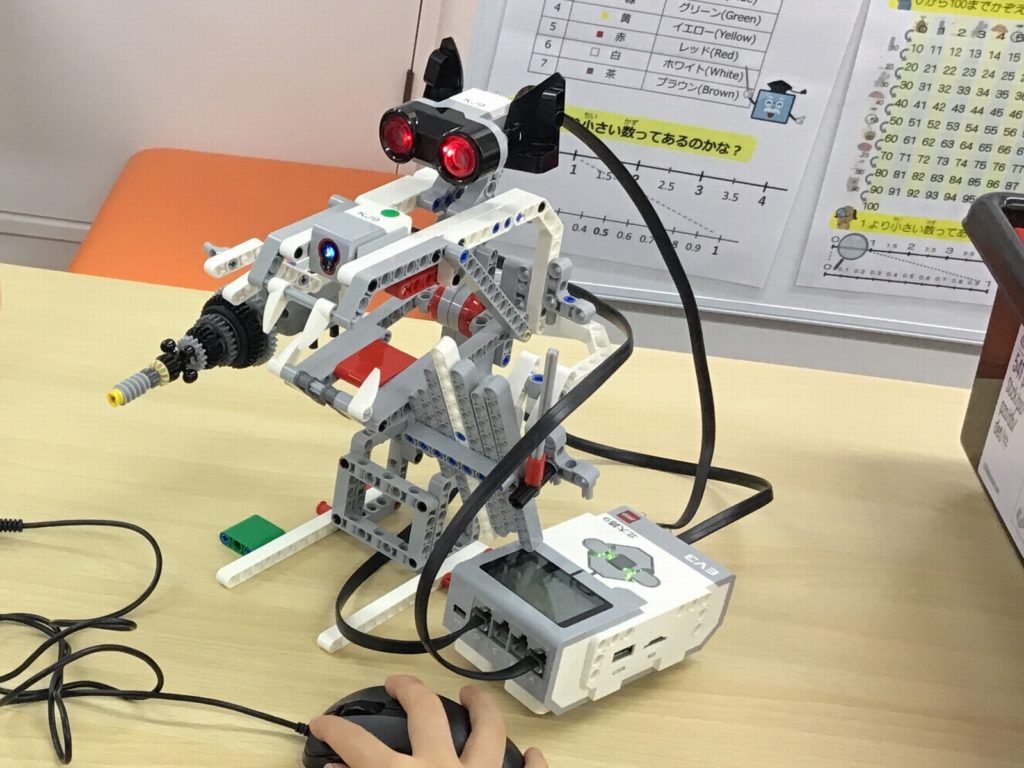
そして、4時間弱の格闘の結果、こんな感じになりました。