子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
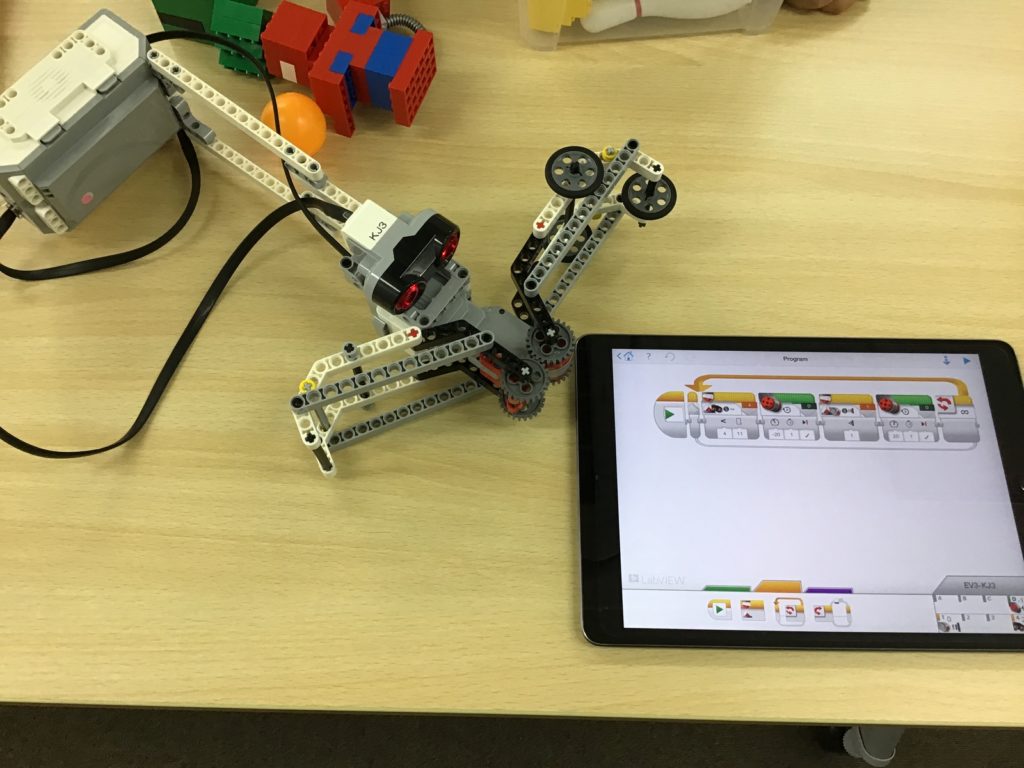
1月のスタンダード2コースでは、「トレース&キャッチ」というミニ競技に取り組みました。
まずは、白い紙に引かれた黒いラインをトレースして(たどって)進みます。ということで、夏休み前に取り組んで以来、久々にライントレースという技術を用いることになります。(忘れていた内容も、少しずつ思い出してきました。)
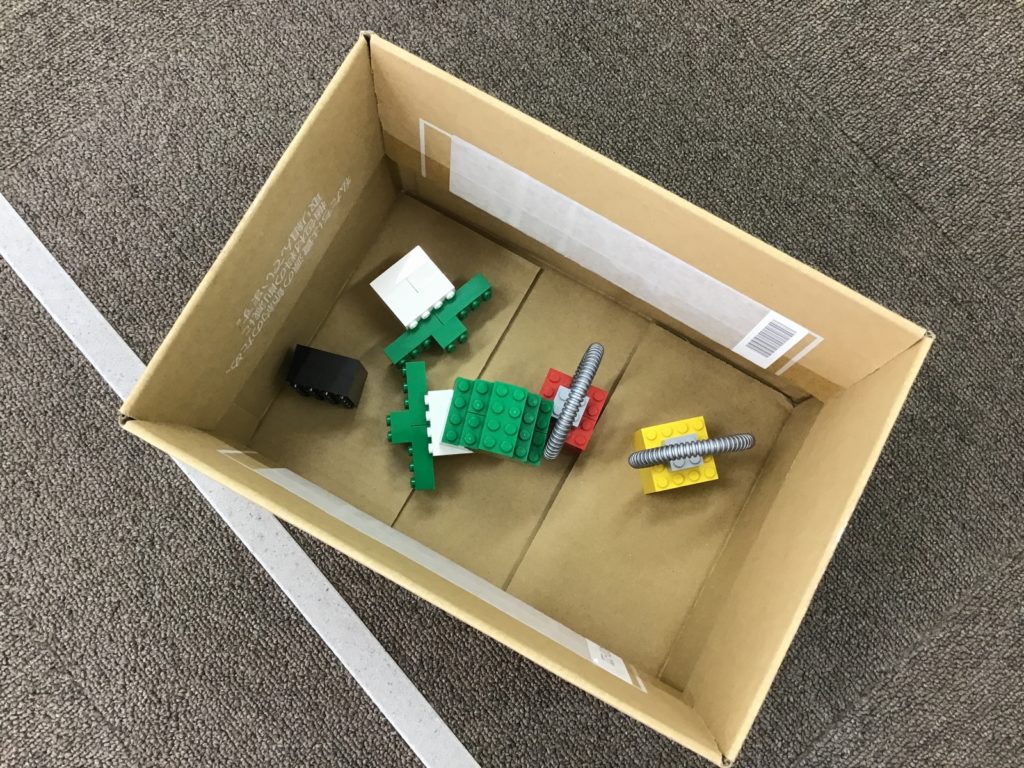
そして、その先にはボールが置いてあり、これをキャッチして(つかんで)、決められたエリアに運び入れ、最後はスタート地点に戻ってきます。
北大路校では4つのレベルを設定し、順番にクリアを目指しました。
<レベル1>
レベル1は前方左手、ボールの置かれた位置から近いところにある枠の中に、ボールを運び入れます。
実は、レベル1が最も時間がかかります。キャッチする方法、その後にボールを運ぶ動きの調整、戻り方など、順番にステップを経てクリアを目指します。
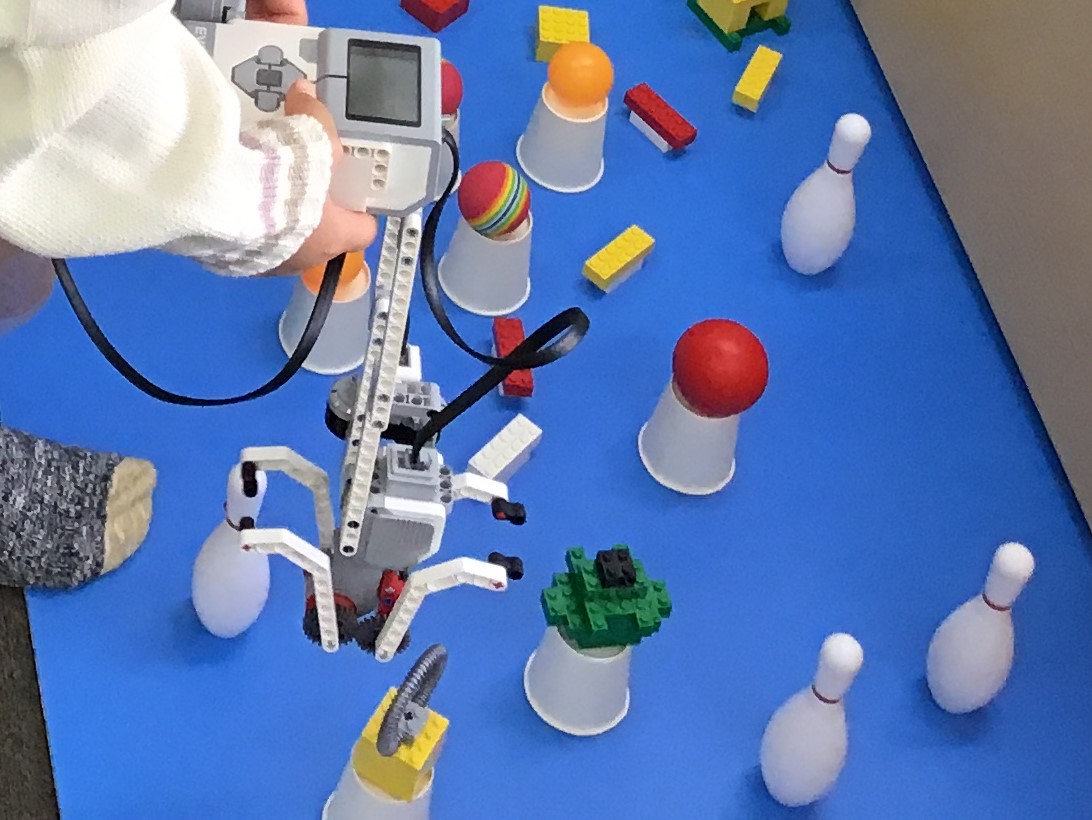
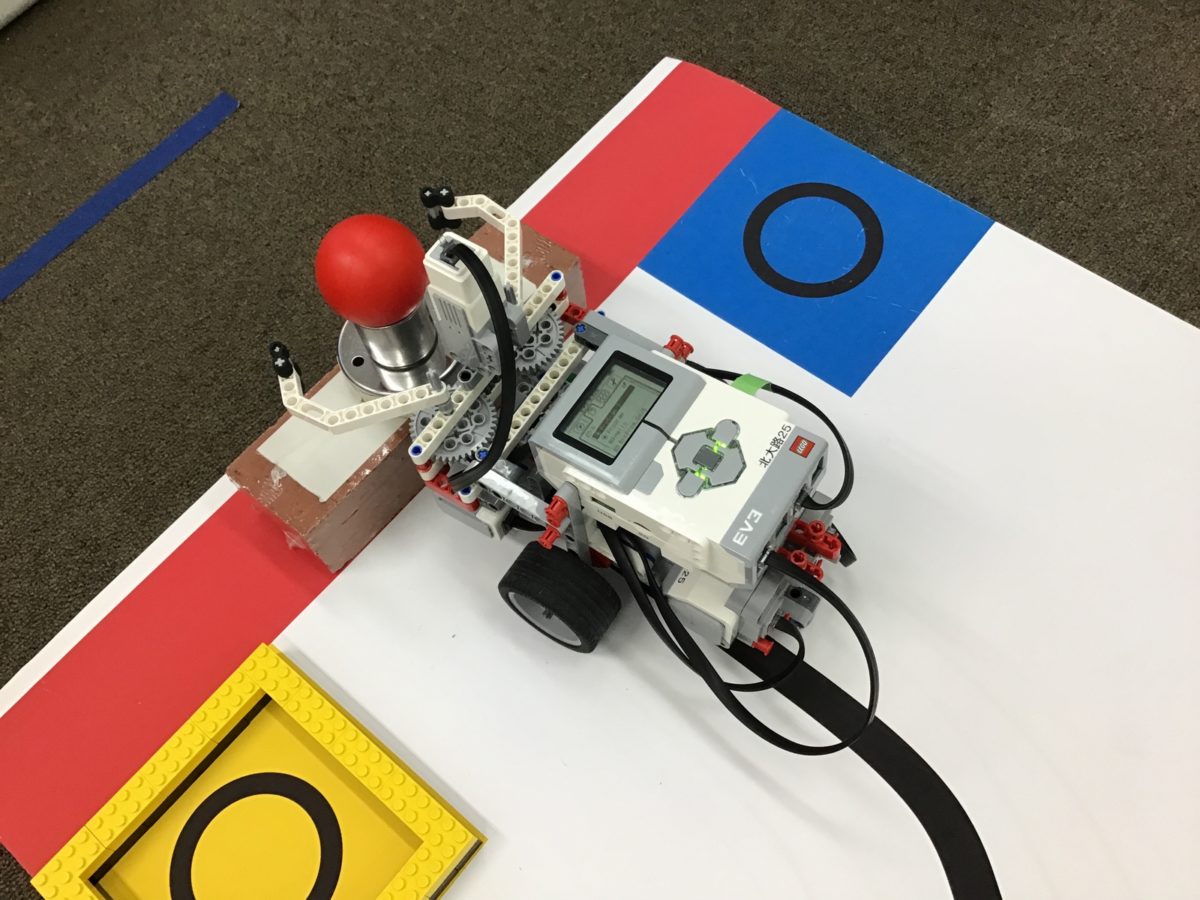
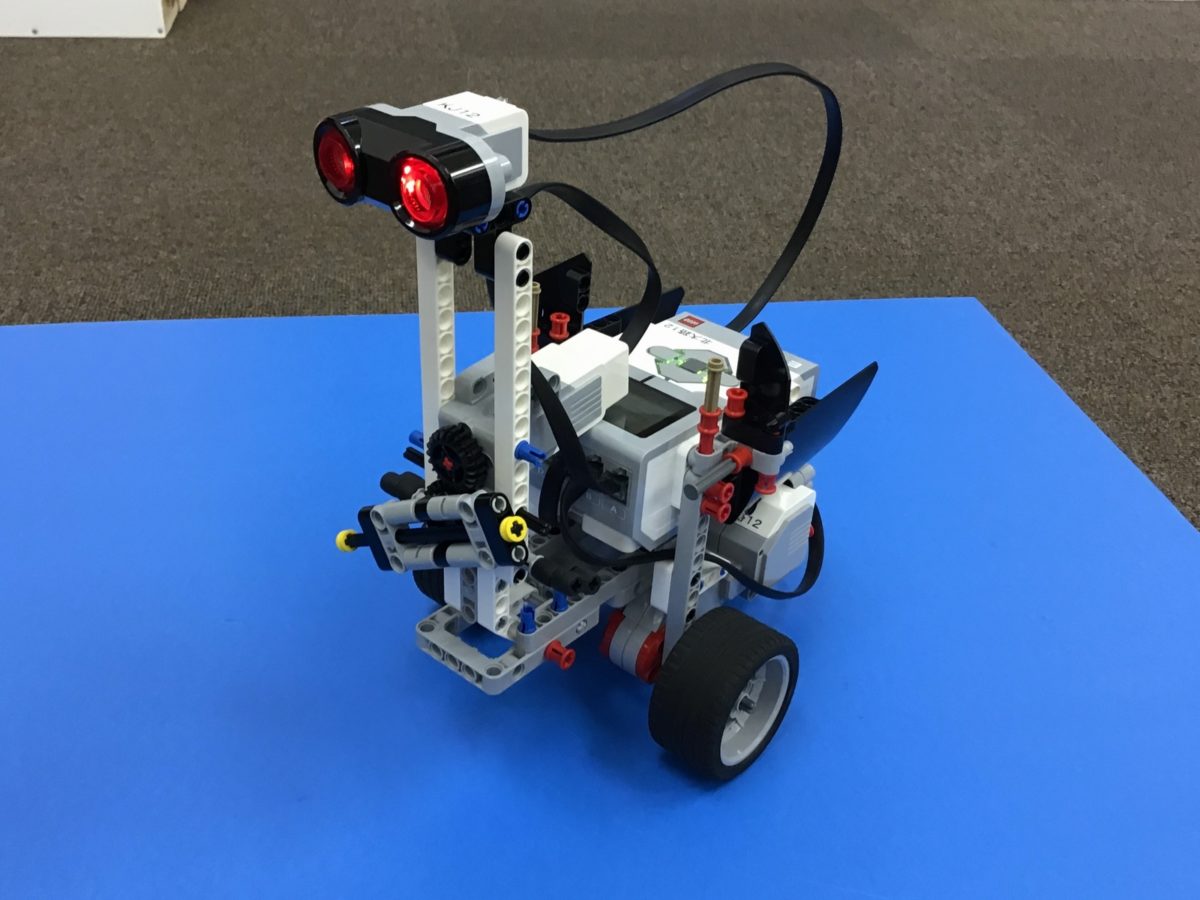
この生徒さんは、ボールをアームで抱え込んでつかむタイプです。アームの下から落としてしまわないようにサポートを付ける改造をしています。
また、方向転換して一気にスタートへ戻ってきます。
<レベル2>
レベル2は、前方右手のコップの中にボールを運び入れます。
コップが小さいので、気持ち的に「難しそう」と思って、あきらめてしまいがちですが、やってみると、レベル1のプログラムの曲がる方向を逆にしたり、少し調整するだけでクリアできる場合があります。
自分が作ったプログラムと実際の動きのどこがどこなのか、を理解することがクリアへのポイントです。
この生徒さんは、かなりの慎重派。動きをゆっくりにして失敗しないように気を付けています。
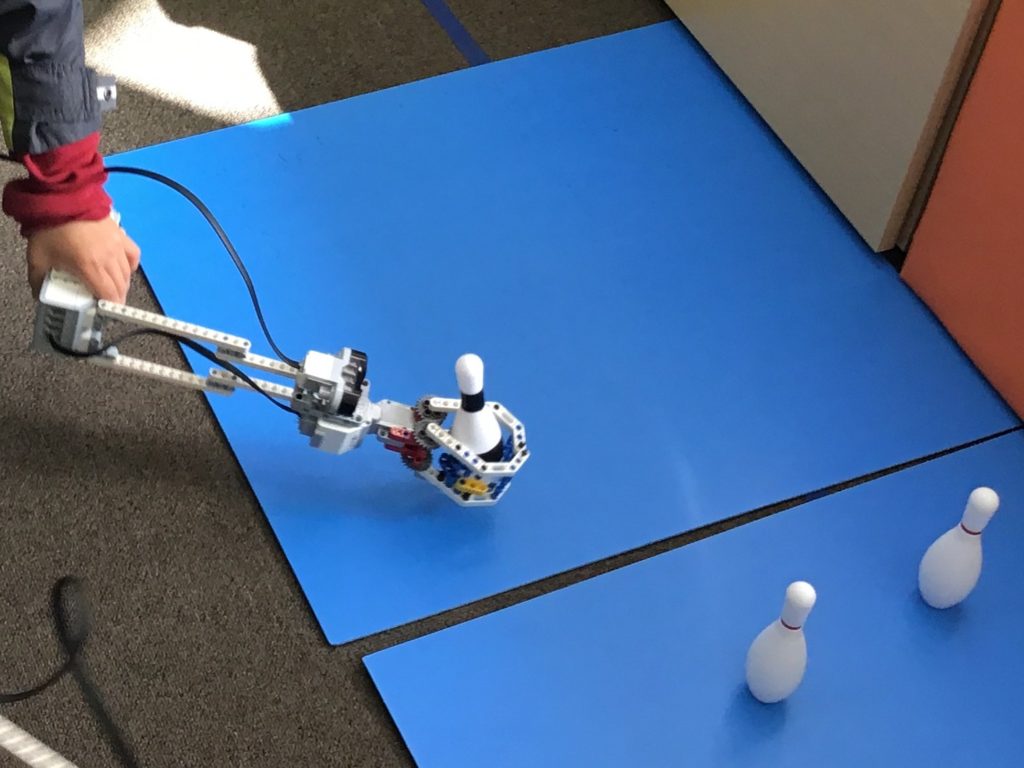
ボールのつかみ方は先ほどの生徒さんと似ていますが、ちょうどボールがつかみやすいところにアームを増やしました。これでしっかりつかめます。
スタート地点への戻り方もライントレースを使う作戦です。
<レベル3>
レベル3はスタート地点に近い場所までボールを運び、枠の中にボールを入れます。
運ぶ距離が長いので、落とさないようしっかりつかむ必要があります。
ポイントは、つかんで戻ってくる際に、できるだけ誤差を小さく、確実に枠に近づくこと。そのためには、壁ドン(壁に当たって体制を整える)やセンサーをうまく使うとよく、つまり、ライントレースで戻るのがとても有利です。
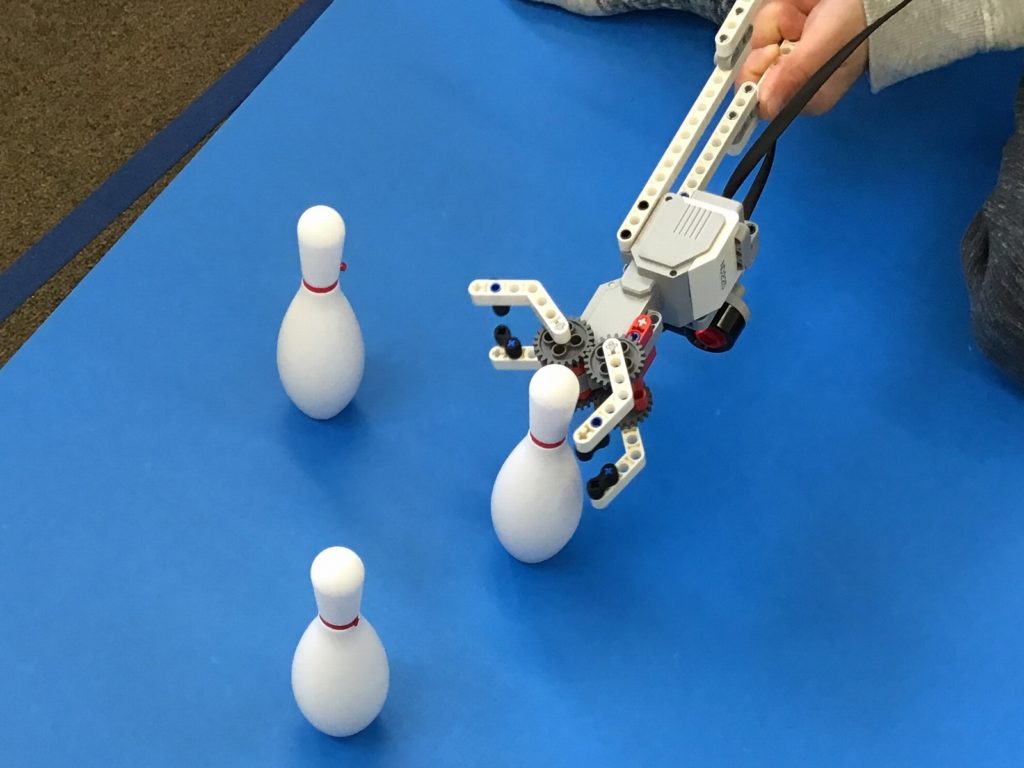
この生徒さん、ボールをキャッチするのはアームの指先です。が、レンガに当たって停止した後、そのままアームを動かしても指先にちょうど合わないので、少しバックしてうまく合うように調整しました。
<レベル4>
レベル4はスタート地点に近くのコップの中にボールを運び入れます。
レベル4まで到達できる生徒はそんなに多くなく、どちらかというと、レベル1や2で終わってしまうことも多いです。
というのも、最初のうちは失敗を何度も繰り返すのですが、これに心を乱され、チャレンジが怖くなったり、あきらめてしまったり・・・
今回の競技は「いっぱい失敗しよう」の練習、という側面もあるのかなと思います。
→プログラボの詳細と無料体験会のお申し込みはこちらから