子ども向けロボットプログラミング教室プログラボ北大路のえもりです。
アドバンスト1・2・3といった上級生たちのクラスは、夏のロボット競技大会に向けて4月から準備や実際の取り組みを進めています。
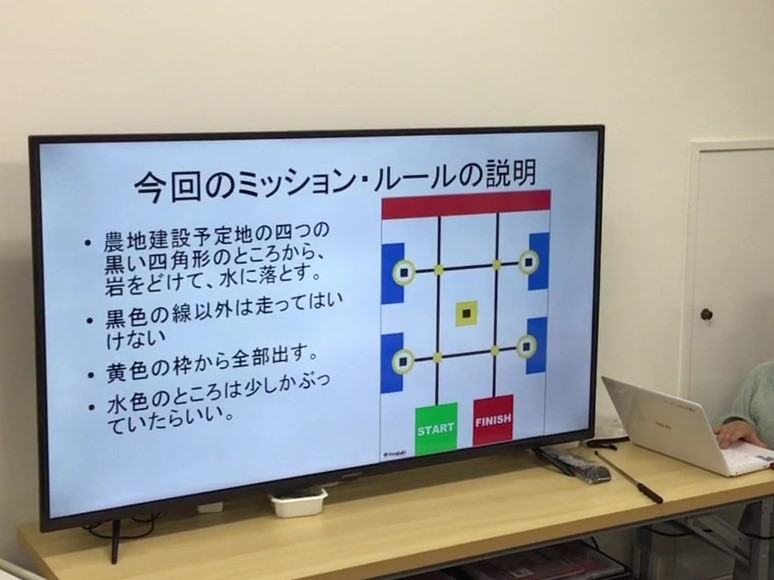
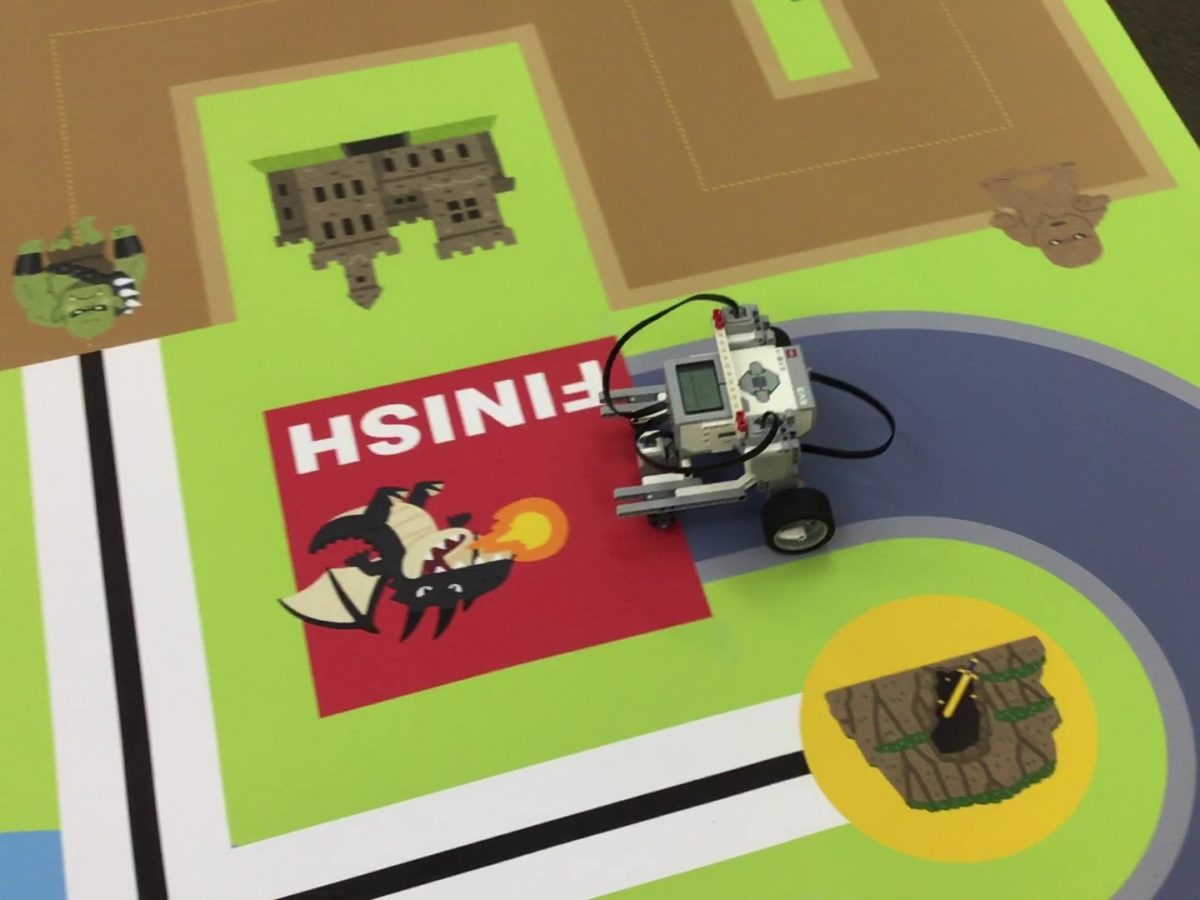
アドバンスト1クラスでは今年度の最初の内容として、RPG風のコースを用いたミッションに取り組みました。
「ゴーレム」「オーク」「クラーケン」「ケルベロス」「ドラゴン」といろいろなモンスターがコースに出てきて、取り組むみんなもちょっと楽しそうです。

主な目的は、ロボット制御に関する復習なのですが、
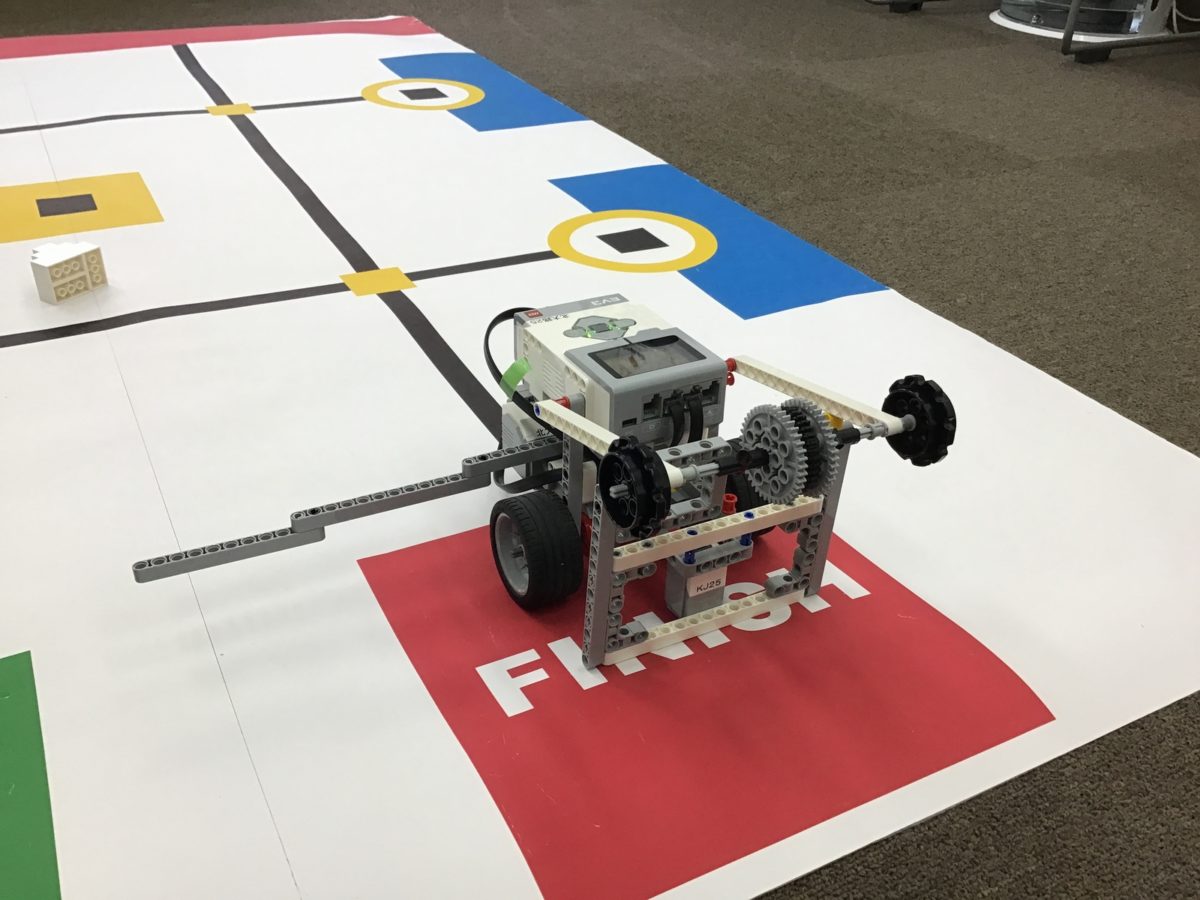
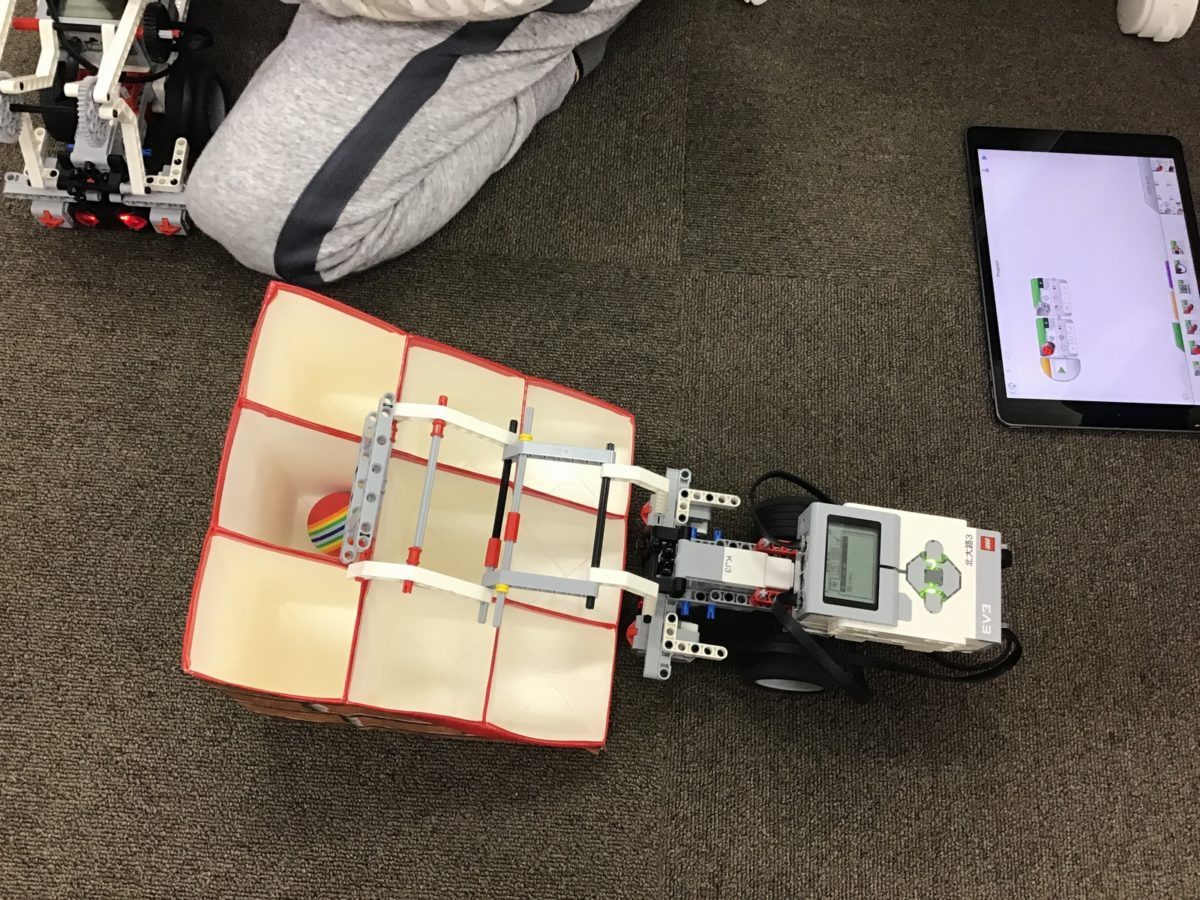
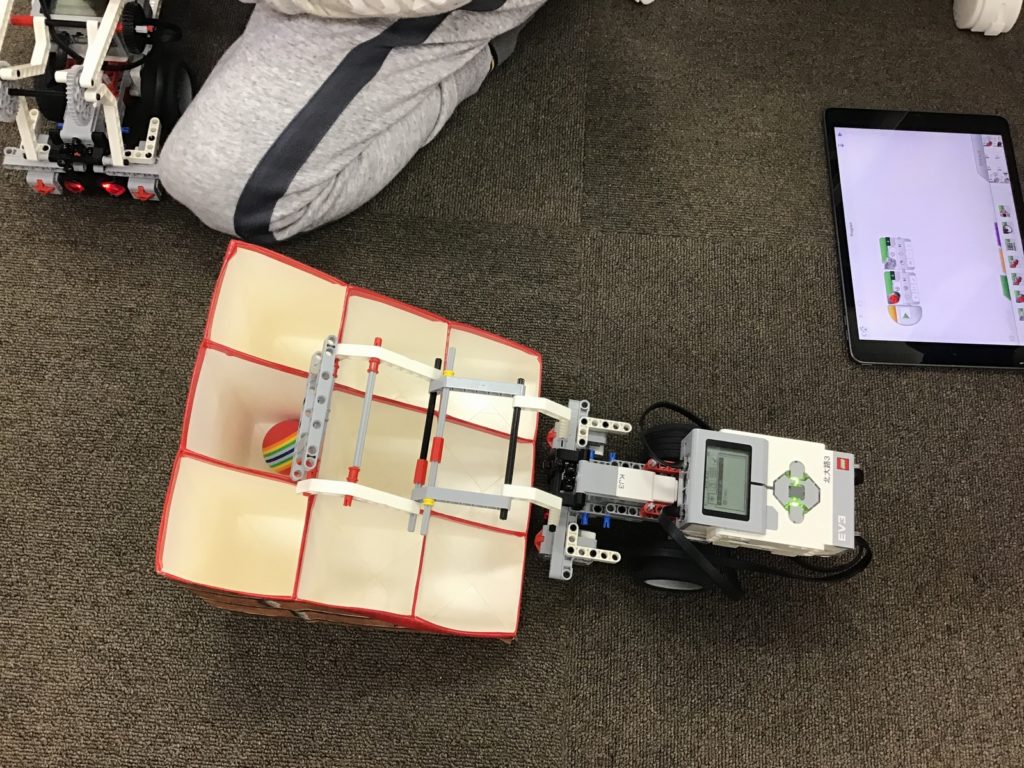
・昨年度までと比べて大型になったロボットを正確に動かす。(特にきっちりターンできるように)
・ライントレース(黒い線をたどりながら移動する技術)を思い出す。
という感じになります。
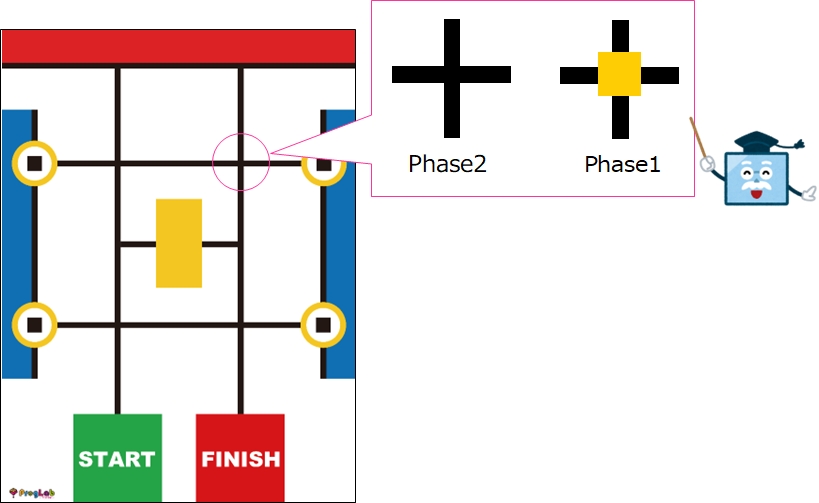
さて、このコース、結果的に一番難しかったのが「オーク」のところでした。
単純な移動からライントレースに切り替わる際に、ライントレースで黒い線にうまく乗るための「切り替え地点」の範囲がすごく狭く、長い距離を移動してくるとどうしてもズレやすくなってしまします。
このズレをどうやって解消するか(スタート地点の調整なのか、プログラムの調整なのか、はたまたセンサーを使うのか・・・)というのがポイントになりました。
半分くらいの生徒は、最終的にはうまく乗れるように調整できました。(本番は運の要素もありますが・・・)
そして、そこの激ムズポイントを超えられたら、あとはゴールまで駆け抜けます!
ちなみに、剣(ソード)が置かれた洞窟が途中にあり、ここに立ち寄るとポイントアップすることを、サプライズで最終日に突然伝えました。
残り時間は約1時間。挑戦するかしないか、それぞれに任せたところ・・・3人の勇者が挑戦し、3人ともクリアすることができました。
1年前の最初のミッション、失敗を恐れてなかなか頑張れなかった生徒もいたのですが、1年経って、失敗しても何度も挑戦することに慣れてきたようで、成長を感じることができました。